

简介
全景技术是目前迅速发展的一种新型视觉技术,利用特殊的全景成像装置可以获得水平方 向上全360°,在垂直方向一定 角度 的视 场。这 种 成像方式能实时提供对象和环境的全方位信息,为后续的图像处理和分析争取时间。全景镜头技术在机器视觉、管道探测、医学内窥检查、周视监测等方面有着非常重要的意义,在航空、国 防、民用、医学等领域有着广泛的应用前景。1
早期为了获得大视场成像,通常采用鱼眼透镜和旋转拼接技术,利用鱼眼透镜能获得接近半球的视场,但其 畸 变 较大,且结构复杂,造价昂贵;旋转拼接技术缺点是视场拼接复杂,不易小型化,且不能对环境瞬时成像,实时性较差。为获得360°全景像,人们提出了平面圆柱投影法(flat cylinder perspective,FCP),将一个柱面视场投影到二维像平面。继 Mangin在1878年采用这种方法设计了观察天空的全景望远 镜 后,世界各地 都出现了采用平面圆柱投影法的全景光 学系统专利,按反射次数分类可分为两类:单反射面折反射全景成像系统和多次反射面折反射全景成像系统前 者 特点是:成像视场大,结构简单,成本低廉,且单个反射面易于设计和加工,缺点是大视场情况下反射面比较庞大,系统很难小型化;后者采用多次反射获得大视场,系统较小,结构紧凑。其中应用较广泛的是 P.Greguess在1986年提出的全景环形镜头,其将反射面和折射面集成在同一透镜上,结构较紧凑。2
全景环形镜头工作原理全景环形镜头的核心元件是前端的凹凸反射镜结构,它是实现大视场成像的基础,其结构如图所示。凹凸反射镜结构包括2个折射面(3,4)和2个反射面(1,2),轴上光线及小角度入射光线被反射镜1阻挡,无法进入全景镜头成像,形成中央盲区。物空间 AB 区域内 发 出的光 线 从 折 射面 3入射,经过反射面2反射后,再经过反射面1,最后通过折射面4出射,其先在两镜结构内成一虚像,中间虚像经过中续系统转接后再成像在像面探测器上形成环带像。入射光线从折射面3入射时,光轴下半部分光线入射到反射面2上半部分,光轴上半部分光线入射到反射面2下半部分,这样大大提高了系统的视场范围,使得整个 系 统成 为 具有大视场角的光学系统。全景环 形 镜 头 在 探 测 器 上 所 成 的 像 为 环 带像,同一视场角下的景物在像面上位于同一个圆,该圆的半径就是像高。环状像面的内半径由环带镜头视场上边缘对应的视场 角 决 定,外 半 径由 环带镜头的下边缘对应的视场角决定。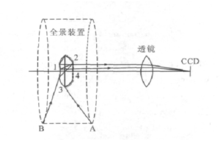
P. Greguss提出的全景环形镜头模型,成像原理为由两个折射面和两个反射面构成前面的模块,以一定角度入射的光束经全景环形成像模块的两次折射和两次反射后在全景环形模块的内部或后面形成一虚像,中继系统转接中间虚像,并将最后的像成在像面传感器上。全景环形结构的两次反射都发生在全景环形模块的内部,其特殊的结构和成像模式使其对光线的走向有严格的限制,入射的全口径光束中仅有一部分能通过全景环形镜头成像,所以入射光束的宽度相对较小,且不同角度入射的光束从第一个折射面的不同位置入射,相当于扫描成像系统中的角度扫描,整体系统近似满足f-θ成像,像高h= fθ。
应用圆柱投影法的全景镜头期以来,人们一直对于全景成像技术的实现方式有浓厚的兴趣,传统的成像设备基于中心投影法,是人眼观察外部世界的方式,也是针孔相机的成像方式,为了获得360°的全景图像,需要一个无限大的像平面,物理上很难实现。3随着计算机技术和数字图像传感器的发展,对数字相机绕其光轴旋转所拍得的序列图像进行无缝拼接,既可以获得人工合成的全景图像,也可以采取围绕一个固定点安装多个摄像机,使得摄像机的全部视场加起来形成全景视场,所得到的图像仍然需要拼接,成像机理仍然是中心投影法。为了克服中心投影法的缺陷,人们提出了平面圆柱投影法,在三维空间视场和有限的二维像平面建立了一种新的投影关系,即将三维圆柱区域通过特殊的系统投影到二维平面的圆环区域,如图所示。环形像的宽度对应圆柱视场上与光轴形成的视场角,相面上的每个同心圆代表物空间与光轴成一定夹角的圆柱面的投影,灭点在圆心,其中张角T所对应的圆柱面是视场区域,2U角所围成的区域为视场的盲区,T和U随系统的不同大小有差别。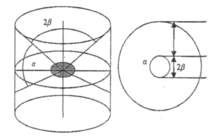
基于鱼眼透镜的全景镜头一种有效的实现大视场方式的方式是基于鱼眼透镜的成像系统,鱼眼透镜实际上是超广角物镜,超广角物镜由于有非常短的焦距,通常焦距小于16mm,因此能获得接近半球或者大于半球的全景视场,图2为一种结构的鱼眼透镜,在获得大视场的同时,鱼眼透镜的设计者必须做出牺牲,即允许桶形畸变的存在,结果是除了图像中心的景物保持不变,其它本应水平和垂直的景物沿各个方向从中心向外辐射。目前该技术发展已经比较成熟,很难再增大视场。虽然理论上物像关系是一一对应,但是因为结构复杂,故校正起来比较困难。另外,为了获得大于半球的视场,高质量的鱼眼透镜通常要采用10片以上的透镜和高质量的光学材料,系统复杂,造价昂贵。4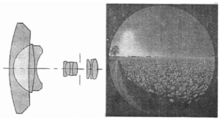
旋转拼接式全景成像系统随着计算机和数字图像处理技术的发展,采用常规光学镜头,绕与光轴垂直的固定轴旋转,或者围绕垂直光轴的固定点安装多个常规成像系统,将得到的序列图像进行拼接,得到人工制造的全景图像,这是一种硬件和软件相结合的方法。国内一些机构在80年代就研制出旋转式全景相机并投入使用。其中硬件部分必须有精确的转动机构,常规相机可以是普通透镜相机也可以是鱼眼透镜的相机,采用后者的好处在于它本身已经有很大的视场,所以一般只需要2~ 3幅图像就可以获得全景,但是图像需要校正。图为旋转拼接式全景成像的模型,摄像机通过围绕固定点旋转扫描得到全景视场。由硬件部分得到的序列图像必须通过软件进行无缝拼接,目前有大量的商业和免费的图像拼接软件,例如Pixround公司PixMaker Value软件可以将不同方向视场的图像进行无缝拼接,得到一幅全景图像,。
该系统的缺点在于由于系统中存在转动机构,故系统的实时性很难得到满足,在实时性要求较高的场合无法应用。由于每一幅要拼接的图像是用常规相机获得,可以得到很高的分辨力,因此拼接后的整个全景图像的分辨力也很高,前面提到了“勇气”号火星探测的全景相机就是采用常规相机旋转构成。在计算机视觉和一些实时性要求不高的场合,尤其是全景3D的重建,该技术得到了广泛的应用。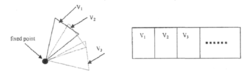
折反射全景成像系统折反射全景成像遵循平面圆柱投影法,图像的灭点不再是一条直线,而是一个点,系统是在常规成像系统的前面加入反射面达到圆柱投影的目的,经过精心设计,可以使它的成像范围大大超过遵循中心投影法的纯折射式系统,且容易构成f-θ系统。最简单的折反射全景成像系统由一个常规的相机和一个反射面构成,如图5所示。折反射全景光学系统按照其是否满足单视点约束可以分为单视点成像系统和非单视点成像系统。单视点满足针孔成像模型,也是目前计算机视觉所采用的基本模型,但是单视点物像关系对应复杂,透视全景成像的校正算法复杂,计算量大;非单视点全景成像系统由于视点不是固定点,而是在一个比较小的区域,因此物像关系可以线性的对应,使得全景投影算法简单。5
按照反射次数的多少,折反射全景成像系统可以分为单反射面全景成像系统和多反射面全景成像系统(一般反射两次)。单反射全景成像系统采用现成的成像设备,结构简单,成本低廉,单个反射面易于设计加工,但缺点是不利于系统的小型化,要获得大视场,反射面设计的比较庞大,系统很难集成;多反射面全景成像系统采用多次反射,获得大视场,将反射面和折射面集成在一起,系统较小,结构紧凑,缺点是光学结构设计复杂。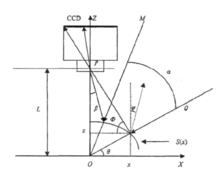

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国