

高频疲劳试验机用于进行测定金属、合金材料及其构件(如操作关节、固接件、螺旋运动件等)在室温状态下的拉伸、压缩或拉压交变负荷的疲劳特性、疲劳寿命、预制裂纹及裂纹扩展试验。
基于不同的应用,高频疲劳试验机还可分为电磁式与电机式两种。电磁式高频疲劳试验机的动态位移相对较小,但是可以提供高达500Hz的试验频率。电机式高频疲劳试验机在频率上不及电磁式但是提供了更大的位移量以满足结构件试验的需求。
简介高频疲劳试验机在配备相应试验夹具后,可进行正弦载荷下的三点弯曲试验、四点弯曲试验、薄板材拉伸试验、厚板材拉伸试验、强化钢条拉伸试验、链条拉伸试验、固接件试验、连杆试验、扭转疲劳试验、弯扭复合疲劳试验、交互弯曲疲劳试验、CT试验、CCT试验、齿轮疲劳试验。
除以上的用途外,高频疲劳试验机特别是电机式高频疲劳试验机还在零部件疲劳试验领域有广泛的应用。1
高频疲劳试验机研究国内外现状疲劳试验机按频率分为低频疲劳试验机、中频疲劳试验机、高频疲劳试验机、超高频疲劳试验机。低频低于30Hz的称为低频疲劳试验机,30-100Hz的称为中频疲劳试验机,100-300Hz的称为高频疲劳试验机。300Hz以上的称为超高频疲劳试验机。机械与液压式一般为低频,机电驱动为中频和低频,电磁谐振式为高频,气动式和声学式为超高频。
国外对高频疲劳试验机的研究开发相比国内早很多,瑞士Amsler和英国Instron公司对高频疲劳试验机的研发比中国相对较早。而中国国内对于高频疲劳试验机的研究相对滞后,主要的研究厂家为长春试验机研究所和红山试验机厂两家。在上世纪50年代末期,参考瑞士Amsler公司的10HFP422为主要的研究对象,对其进行学习、分析、研究,1968年末国内参照英国Instron公司的许多产品,特别是英国公司的1603型机器,这种机型的技术对国内的高频试验机的制造有着重大的影响,该机型主机结构方面和电控单元在70年代时引领高频疲劳试验机的发展,所以国内高频疲劳试验机在发展过程中又借鉴了许多Instron的新技术和Amslerd的机械单元和电控单元产品。
从疲劳试验机的控制单元系统来看,国内设计、制造的疲劳试验机主要分为两大类:第一类以线性扫频幅度为控制单元系统(AMSLER公司主要机型多采用此种系统),第二类为PWM脉冲调宽型控制系统(INSTRON公司主要机型多采用此种结构)。归纳总结我国目前研制的疲劳试验机,国内对于疲劳试验机的控制系统主要借鉴国外技术。控制单元系统主要有:一是将线性扫频幅度技术应用到控制系统,这种控制技术原理主要是载荷传感器的反馈与移相扫频相结合的原理来控制起振相位,这种技术主要是借鉴于瑞士AMSLER公司的10HFP422型号的高频疲劳试验机的控制单元系统;二是将PWM脉冲调宽技术应用到控制单元系统中,这种技术主要是借鉴于英国Instron公司高频疲劳试验机产品,经国内研发改进并应用。1
简述高频疲劳试验机原理根据疲劳试验机的驱动方式和驱动单元的不同,可分为:电磁驱动型、电液伺服型、气压驱动型、杠杆、离心机构驱动型、曲柄机构驱动型等多种形式的疲劳试验机。
其中,以电磁力为驱动单元的高频疲劳试验机的工作原理是利用系统的共振现象来工作的。电磁驱动疲劳试验机的机械结构是由机架、电磁振动器、振动弹簧、载荷传感器、试件和配重质量块组成整机的振动系统。动力单元中有由电磁振动器提供振动动力源来提供激励,形成振动源。若电磁振动器输出的激振力的频率相位值与整机系统的固有频率相同,则整个振动系统产生共振,则配重质量物体在整机上产生共振现象,输出的惯性力往复作用于被测试试件上,以此完成疲劳测试。
电液伺服型疲劳试验机是以恒压伺服液压泵站作为动力源来对试件进行加载。气压驱动型疲劳试验机是以恒压伺服气压泵站作为动力源来对试件进行加载。杠杆、离心机构驱动型和曲柄机构驱动型疲劳试验机依靠机械结构的直线行程来构成机器的动力源。1
电液高频疲劳试验机疲劳试验机是一种主要用于在室温状态下,测定金属及其构件的疲劳性能、疲劳寿命,完成预制裂纹及裂纹扩展等疲劳试验的机器。试件在激振器产生的交变载荷作用下进行断裂韧性试验,测试金属材料裂纹扩展速率及材料的门坎值。当激振系统的振动频率等于系统自身的固有频率时,即系统发生共振,所产生的微小激振力经过放大后作用在试件上可进行材料疲劳试验。电液高频疲劳试验机由于其动态响应快、输出功率大等优点,因而在疲劳试验机领域得到广泛应用。2
结构图1是电液高频疲劳试验机的实物图。

电液高频疲劳试验机的激振器被安装在试验机的底座内,它是一种由2D激振阀控对称缸构成的新型电液激振器,在2D激振阀的驱动下可实现高达2500Hz的激振频率。通过控制双边阀控单出杆的同步运动,调节上夹头高度以适应长短不一的各疲劳试验材料。当试验材料被上下夹头固定后,2D电液激振器开始工作。2D激振阀连续旋转驱动电液激振器实现往复振动,从而带动试件进行疲劳试验,激振频率与2D激振阀阀芯的转速成正比。通过控制2D激振阀的轴向运动实现激振幅值的变化。为了测量试件在拉应力、压应力以及拉压交变应力下的疲劳特性,需要对激振器的激振中心平衡位置进行偏置控制从而改变电液激振器输出的载荷力性质,而由于2D激振阀的转阀特性,无法加入偏置信号,因此在对称液压缸上并联一个数字伺服阀,其结构与控制单出杆液压缸的2D数字阀相同。
改变数字伺服阀的开口大小和方向就可以实现激振器振动中心位置的偏置,偏置量与数字伺服阀的阀口开度成正比。当需要对试件进行拉伸或压缩试验时,只需改变并联数字阀的阀口方向和开口大小即可实现拉应力和压应力的变化,也可实现拉压交变载荷的应力输出。单出杆液压缸所用油源与电液激振器的油源相互独立,以免油压波动造成横梁高度发生变化。电液高频疲劳试验机的控制系统通过调节电位计即可实现电液激振器激振频率、幅值以及振动中心偏置的控制。2
工作原理2D激振器是电液高频疲劳试验机的控制系统核心。其控制部件是2D激振阀。
(1)2D激振阀频率与幅值控制原理
2D激振阀具有圆周方向的转动和轴向的直线运动两个运动自由度,是一种具有特殊结构的转阀,分别由永磁同步伺服电机驱动阀芯的转动和直线步进电机驱动轴向的滑动,从而改变激振器输出的激振频率和幅值。
2D激振阀工作原理如图2所示。

阀体上有4个开口,分别为A、B、P、T,其中A、B为负载口,分别与液压缸左右腔相通,P为进油口,T为回油口。当2D激振阀的Ⅱ、Ⅳ阀口打开时,Ⅰ、Ⅲ阀口关闭,A口和P口导通,B口和T口导通,油液通过激振阀P-A流入从液压缸左腔,而液压缸右腔的油液通过B-T的通道流出,活塞在液压油的推动下向右运动,如图2a所示; 当2D激振阀阀芯旋转过某一角度后,Ⅰ、Ⅲ阀口打开,Ⅱ、Ⅳ阀口关闭,如图2b所示,此时B口和P口导通,A口和T口导通,油液从液压缸右腔流入,左腔流出,推动活塞向左运动。这样当2D激振阀阀芯在永磁同步伺服电机驱动下做连续旋转时,Ⅰ、Ⅲ和Ⅱ、Ⅳ阀口组合交替打开与关闭,使液压缸左右两腔的油液发生周期性变化,活塞在液压油的作用下实现往复振动,从而带动试件进行疲劳试验。阀芯的左侧安装有一个弹簧,控制安装在堵头一侧的直线步进电机可以实现阀芯的轴向滑动。
直线步进电机转动角度就会产生一定的线性位移,驱使阀芯轴向向左移动时,弹簧被压缩; 当阀芯需要向右运动时只需缩小电机的线性位移,依靠弹簧的回复力推动阀芯运动,从而使液压缸的流量大小发生变化,改变液压缸输出的振动幅值。
(2)2D激振器偏置控制原理
考虑到2D激振阀的转阀结构,激振器无法引入一个偏置信号实现激振中心位置的偏置控制。为了解决这个问题,提出了一个并联控制方案,即在液压缸上并联一个数字伺服阀,以这种并联机构和电-机械转换器为基础,构建了电液激振器的偏置控制系统,实现激振器振动中心偏置的控制。
电液激振器的偏置控制原理如图3所示,与2D激振阀并联的数字伺服阀为一滑阀,其阀芯位移由步进电机转子通过齿轮啮合进行驱动,改变转子的角位移可以实现数字伺服阀阀芯的左右移动,使得通过数字伺服阀流入液压缸左右两腔的流量发生变化,从而实现激振器活塞振动平衡位置的偏置,改变激振器输出载荷力性质( 拉伸应力或压缩应力)。
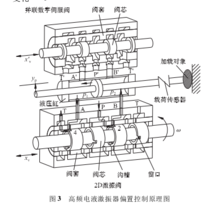
由于数字伺服阀在该系统中起偏置作用,故而也将它称为偏置阀。当并联的数字伺服阀阀口关闭时,即偏置阀对激振器没有起偏置作用,振动中心位置为液压缸中心位置; 当数字伺服阀阀芯左移时,P’与A’相通,B’与T’相通,油液通过数字伺服阀的A’口进入液压缸左腔,而右腔液压油从B’-T’口流出,活塞在左腔液压力的推动下向右移动; 当数字伺服阀阀芯向右移动时,P’与B’相通,A’与T’相通,油液通过B’口进入液压缸右腔,而左腔液压油回油,活塞向左移动。激振器工作时若需要对激振中心位置进行偏置,则将数字伺服阀打开一个固定开口,此时偏置阀对活塞的作用力恒定,因此可将其视为一恒定负载作用于液压缸。激振器的振动频率和幅值不受偏置阀的影响,且偏置阀的偏置作用不因激振频率的改变而发生变化。2
本词条内容贡献者为:
李勇 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国