

异步电机绕组除产生基波磁动势外,还产生一系列谐波磁动势,由各谐波磁动势所产生的谐波磁场可分解为相带谐波磁场及磁势齿谐波磁场1。
谐波磁场的产生异步电动机中谐波磁场的产生,主要是由于以下两方面的原因。
(1)绕组磁势曲线不是正弦波形;
(2)空气隙是齿形构造,不是光滑、均匀的。
下面分别进行分析:
1、由于定子绕组磁势曲线为非正弦波而产生的谐波磁场
由定子绕组磁势曲线可知磁势沿气隙圆周的分布并不是正弦形,而是阶梯形。并且说明过一个矩形波实际上是由基波(频率和原波形相等)和许多谐波共同组成的。
阶梯形的定子绕组磁势曲线可以看成是许多不同的矩形波的迭加。既然矩形波是由基波和许多次谐波所组成,因此阶梯波也必然是由基波和许多次谐波所组成。阶梯波中的基波,其频率和绕组磁势曲线本身频率相等,因而基波极数就等于电动机极数,它的幅值最大并产生电动机的主磁场。基波以外的各次谐波,其频率为基波的整倍数,因而其磁场极数也为主磁场的整倍数。
单个矩形波,其谐波次数为三、五、七、九……奇数次。然而,单绕组多速电动机绕组磁势曲线的波形常具有不同的情形,它可能既含有三、五、七、九……奇次谐波,又含有二、四、六、八……偶次谐波2。
2、由于气隙的齿形构造而产生的谐波磁场
异步电动机定子铁心是开有槽、齿的,因而沿圆厨空气隙是齿形构造而不是光滑、均匀的。以前我们在画绕组磁势曲线时并没有考虑到这个因素,实际上是把铁心看作具有圆柱形的光滑平面。
铁和空气两者导磁能力有很大差别。因此当空气隙是齿形构造时,转子和定子之间对着齿的部分,其导磁能力比对着槽的部分要强得多。观察下图(图中假定转子铁心为光滑平面),如果定子铁心没有槽和齿,电动机气隙主磁场波形将如曲线1所示,为正弦形。实际上由于齿和槽两者导磁能力的差别,主磁场波形将变成曲线2(阴影部分)所示的波形。曲线2实际上是由曲线1和曲线3两者合成的。曲线3是一个幅值变化着的(变化规律也为正弦波)正弦波,振幅变化的最大值和零值分别和曲线1的最大值和零值重合。曲线3的频率比曲线1高得多.仔细观察它的波形可以看到每隔一个齿距它就变化一周,因此它在电动机全圆周上的变化周数就等于定子铁心的槽数 。
。
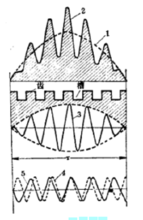
基波磁场在气隙全圆周上的变化周数等于电动机的极对数p。曲线3的周数恰好是基波的 倍,因此曲线3的频率也恰好是基波的 倍。
倍,因此曲线3的频率也恰好是基波的 倍。
理论分析证明:像曲线3那样的,振幅按正弦规律(正弦规律的周数和基波相等,等于p)变化的正弦波,又可以分解成如上图中曲线4、5两个等幅的正弦波。其中曲线4在气隙全圆周上的周数等于 ,因而其频率为基波的(
,因而其频率为基波的( )倍;曲线5在气隙全圆周上的周数等于
)倍;曲线5在气隙全圆周上的周数等于 ,因而其频率为基波的(
,因而其频率为基波的( )倍。如果把曲线1看作基波,曲线4和曲线5就可以看作是()次和()次谐波。
)倍。如果把曲线1看作基波,曲线4和曲线5就可以看作是()次和()次谐波。
归纳以上分析,结论是:由于空气隙的齿形构造,绕组基波磁场将产生次数为( )的一对谐波磁场。这种由于空气隙的齿形构造而产生的谐波磁场叫做“齿谐波磁场”,其谐波次数相对较高。
)的一对谐波磁场。这种由于空气隙的齿形构造而产生的谐波磁场叫做“齿谐波磁场”,其谐波次数相对较高。
齿谐波磁场次数虽然较高,但却是高次谐波中最严重的谐波,因此必须予以特别注意。
当然,绕组基波磁场会产生一对齿谐波磁场,绕组谐波磁场也同样会产生齿谐波磁场。不过,由于绕组谐波磁场比基波磁场小得多,它产生的齿谐波磁场在实用上已可以忽略。
转子方面的谐波磁场前面分析的都是定子方面的谐波磁场,实际上转子方面也同样会产生谐波磁场。因为定子绕组磁势曲线中每一个波,不论是基波还是任意一次谐波,都会在转子绕组中感应出一个与它同次的交变电流,这个电流除了产生与定子同次的交变磁场外,还会产生其余不同次的高次谐波磁场。
根据理论分析,如定子绕组谐波磁场次数为 (基波可以看成为一次谐波,即
(基波可以看成为一次谐波,即 ),则它在转子绕组中感应产生的谐波磁场次数
),则它在转子绕组中感应产生的谐波磁场次数 ,其中为转子槽数
,其中为转子槽数 ,k为零以及任意正、负整数(一般取k=±1就够了,k=±2以上的高次谐波已很微弱,可以忽略)。
,k为零以及任意正、负整数(一般取k=±1就够了,k=±2以上的高次谐波已很微弱,可以忽略)。
如果转子铁心不是闭口槽,即表面也有槽和齿,那么,和定子方面一样,转子也会产生齿谐波磁场,其次数为 。它的影响在高次谐波中也比较严重。
。它的影响在高次谐波中也比较严重。
谐波次数的统一电动机的极数有不同的数值。换句话说,不同极数的电动机,基波磁场的极数也不同。这就会带来一个问题,即同一次谐波磁场对于不同的电动机将有不同的极数。
例如一只两极电动机,其基波磁场为两极;二次谐波磁场为四极;三次谐波磁场为六极……。一只四极电动机,其基波磁场为四极;二次谐波磁场为八极;三次谐波磁场为十二极……。同是二次谐波,一个极数为四,一个极数为八。这样,分析时就很不方便,甚至会造成混乱。
为此目的,我们规定:不论电动机基波极数多少,都以两极波为基准,规定为1次波。四、六、八、十……极波依次规定为2、3、4、5……次波。如果电动机是一只四极电动机,就说该电动机的基波是2次波,它的二次谐波是4次波,三次谐波是6次波,依次类推。
经过这样统一后,不论电动机基波极数如何,同一次谐波磁场的极数就一致了——1次波为两极,2次波为四极,3次波为六级……也就是:谐波磁场级数=谐波次数×2,另外,也可以明显看到:统一后谐波次数=统一前谐波次数×p。
谐波磁场影响的克服方法谐波磁场对电动机性能的影响,有三个方面:一是可能产生异步和同步附加转矩,从而影响电动机的起动性能;二是可能产生振动噪音;三是增加电动机损耗,降低效率。
异步附加转矩的克服方法异步附加转矩的影响是使电动机的转矩曲线发生凹陷,严重时造成电动机的低速潜行,不能起动到正常的额定转速。
产生异步附加转矩的原因是定子绕组磁场中某一次或几次谐波幅值比较强。因此,欲减小异步附加转矩就必须从削弱谐波磁场入手。这可以用以下两种方法:
(1)采用谐波较少的绕组方案
一只单速异步电动机改绕成单绕组多速电动机,在排列绕组方案时可能同时有几种方案存在,不同的绕组方案所含谐波情况也不同。在可能的条件下,从减少谐波磁场影响角度上考虑,以采用谐波较少的绕组方案为好。
比较不同方案的谐波情况时,可以画出不同方案的磁势曲线,根据它们与正弦波形的相差程度即可作出判断。由于所取三相电流瞬间的不同,磁势曲线形状也不同,因此画不同方案磁势曲线时所取三相电流瞬间应一致。对于一个方案,则应至少取两个瞬间画出其相应的磁势曲线,以便做出比较正确的判断。
(2)选择适当跨距
绕组系数等于短距系数和分布系数的乘积,每一次谐波也都有它的绕组系数,它等于该次谐波的短距系数和分布系数的乘积。如果我们有意识地选择跨距使某一次谐波的短距系数很小,甚至等于零;那末该次谐波的绕组系数就会很小,甚至等于零;该次谐波磁场也会很小甚至等于零,它所产生的异步附加转矩也就跟着会变得很小甚至完全消除。
同步附加转矩的克服方法同步附加转矩的影响是使电动机起动转矩发生波动,转子在某些位置时出现“死点”,起动不出;或者使电动机转矩曲线在某一点附近产生同步谷,严重时和异步附加转矩一样,造成电动机的低速潜行。
同步附加转矩的产生是转子谐波和同次定子谐波相互作用的结果。这些谐波次数一般都较高,就幅值来说,除齿谐波外一般都较小(有些转子谐波次数可能较低,但它却是由高次的定子谐波感应产生的,因此幅值也较小)。因此可以认为同步附加转矩主要是由齿谐波产生的。
克服同步附加转矩的方法主要是削弱齿谐渡幅值,以及选择适当的定、转子槽配合以减少或避免定、转子谐波之间的同次,特别是要避免齿谐波的同次。
(1)削弱齿谐波幅值的方法
削弱齿谐波幅值的有效方法是采用斜槽,通常是用于转子上,就是转子的槽不与电动机轴线平行而扭斜一个角度,斜度一般为等于或接近一个定子齿距。
采用斜槽以后,在每个槽斜度的一段距离内气隙导磁能力将比较均匀,因而就可以削弱齿谐波的强度。
(2)减少或避免定、转子谐波同次的方法
在绕组方案已定的情况下,减少或避免定、转子谐波同次的方法是:
1)选择适当的定、转子槽数配合,这个方法是主要的。
2)选跨距为满距2。
本词条内容贡献者为:
王沛 - 副教授、副研究员 - 中国科学院工程热物理研究所

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国