

以模拟信号为工作信号的控制电路,模拟信号指所有在时间和数值上都连续的信号,以该种信号作为输入(一般从主电路中采样进行前馈或者反馈),实现某种控制功能的电路称为模拟控制电路,一般模拟控制电路具备采样模块、A/D、D/A数据采集、I/O模块等,以实现控制功能。
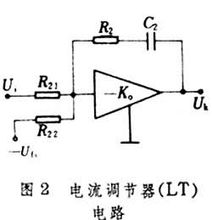
简介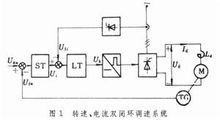 以电流调节器为例,电流负反馈与另一个调节器构成的闭环置于速度环以内,称电流环,该调节器称为电流调节器,用LT表示。为了获得良好的静态与动态性能,两个调节器都采用比例积分(PI)调节器。在运算放大器反馈回路中串入电阻R2和电容C2(图2), 构成比例积分调节器。如选择R21=R22=22千欧,则其输出电压为式中T2=R2C2S为复频率。上式表明,比例积分调节器的输出电压Uk由比例运算和积分运算两部分组成。比例部分迅速反映调节作用,积分部分最终消除静态偏差。
以电流调节器为例,电流负反馈与另一个调节器构成的闭环置于速度环以内,称电流环,该调节器称为电流调节器,用LT表示。为了获得良好的静态与动态性能,两个调节器都采用比例积分(PI)调节器。在运算放大器反馈回路中串入电阻R2和电容C2(图2), 构成比例积分调节器。如选择R21=R22=22千欧,则其输出电压为式中T2=R2C2S为复频率。上式表明,比例积分调节器的输出电压Uk由比例运算和积分运算两部分组成。比例部分迅速反映调节作用,积分部分最终消除静态偏差。
电流调节器中,从主电路采样输出电压到控制电路中,且输出电压可以在任一数值连续变化,因此属于模拟信号,控制电路中的模块均具备处理模拟信号的功能,因此属于典型的模拟控制电路。
双环控制电路速、电流双闭环调速系统电路中的控制信号、调节器输出的各物理量都是时间的连续函数,它们构成一个模拟控制电路,其中速度负反馈与一个调节器构成的闭环作为外环,称速度环,该调节器称为速度调节器。
双环系统的静态工作情况如下:给定信号与速度反馈信号比较后,加在ST的输入端。电动机的速度由给定信号确定,ST输出Ui作为电流给定信号加在LT的输入端,LT的输出Uk送至触发电路对晶闸管整流电压Ud进行控制,以保证电动机在给定速度下运转。稳态时,两个调节器的放大倍数均为调节器的开环放大倍数K0。因为K0足够大,这时ST、LT的输入信号都几乎为零。因此,可以认为该系统是无差系统。ST的输出限幅即为最大电流给定值,正确地整定ST的输出限幅值,即可保证主回路电流不超过允许值。双环系统的静特性如图 3所示。在正常负荷时,速度调节器ST不饱和,依靠ST的调节作用,保证系统具有绝对硬的静特性(无静差)。这时电流调节只起辅助作用。负载电流的大小由电压给定值Ui决定。但由于ST具有输出限幅,所以当电动机的负载力矩过大时,ST进入饱和状态,失去调节作用,速度环呈开路状态。在固定的最大给定电流作用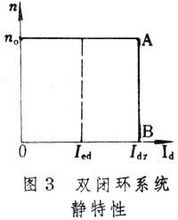 下,依靠电流环对电流进行调节,这时系统由恒转速调节转变为恒电流调节。由于电流调节器也是PI调节器,所以可以实现电流的无静差调节,从而得到了下垂特性,如图中的AB段所示。
下,依靠电流环对电流进行调节,这时系统由恒转速调节转变为恒电流调节。由于电流调节器也是PI调节器,所以可以实现电流的无静差调节,从而得到了下垂特性,如图中的AB段所示。
PLC模拟控制电路应用最广泛的自动化设备当属 PLC,它在处理数据和模拟量等功能时,可靠性高,尽量减小误差范围,抵抗干扰的效果佳。在企业发展旅程中,技术人员怎样改进自动化设备的控制精度,企业追求经济效益,提升生产效益,是本课题研究的一个重要动力。从什么角度来改善 PLC模拟控制系统,是技术人员现阶段需要攻克的难关。技术人员根据实际需求,增强 PLC在工业生产中的控制,针对温度等大滞后性系统从软件和硬件两个方面进行研讨,采用模糊 PID算法、单片机和 CPLD等技术,综合分析,尽量削减误差,使控制精度达最佳状态,并控制生产成本,实现效益的增值。
通常利用以下几种方法,实现 PLC 对模拟量的 PID 控制。一是使用 PID 过程控制模块。它是厂家提供的配套模块,PID 控制程序已设计好,只需修改参数值,便能直接用于采集模拟量,使用方便,控制方法固定,价格昂贵,适用于大型的控制系统,控制多达几十路闭环回路。二是使用PID 功能指令。它比第一种控制方式更加灵活,但对非线性、滞后性的复杂系统无法保证控制效果。同时,它需要配合 PLC 模拟量输入输出模块,在程序中,选择对应的数据寄存器,设置 PID 指令参数表初始化。三是自己编写 PID控制程序。由于实际生产中,具有非线性、时变性和大滞后性的复杂 PLC 模拟控制系统偏多,故常根据系统的特点,自己编写 PLC 程序,这种方式也需配合 PLC 模拟量输入输出模块,灵活性是这三种方式里最强的,适用于各种复杂 PLC 模拟控制系统,成本偏低,实现效果最佳。储水池、变频器、水泵、高压水箱、带有冷却水夹套的热水锅炉单元等构成了锅炉过程控制系统。
对单一的线性系统采用 PID 功能指令控制,但难以满足具有非线性、时变性和滞后性特点工业生产,为解决这个难题,通常采用模拟控制,它是查德教授在美国加利福尼亚大学提出的,从它诞生到2018年已有四十多年了,对于温度等大滞后性系统而言,这种算法更先进,控制原理简单,易于通过编程实现。模糊控制作为智能控制分支之一,它的控制策略一般是指人类自然语言表达的知识和规则,再利用模糊集合论、模糊关系、模糊语言和模糊逻辑推理的方式,将控制策略转化成数字量,这就是模糊控制的基本原理。模糊化、知识库和解模糊这三部分构成了模糊控制器,它是模糊控制系统的核心,Mamdani 型和 T-S 型是常用两种模糊控制器。本文以 Mamdani 型模糊控制器为例,解析各部分的特点。模糊化过程是指选择系统的偏差作为输入变量,依据实际情况,确定取值范围,利用量化因子,按比例把输入变量的精确值变换对应的模糊值,确定模糊子集数量,分别确定归属的函数。数据库和规则库是组成知识库的两部分。为推理机提供数据,是用来存放函数的数据库。模糊控制规则是用规则库来存放的。划分模糊子集越细,规则的数量就越多,对模糊量进行模糊推理和决策,模糊输出量是利用推理机进行推理算法,这就被称为模糊推理过程。由于模糊输出量得出的是模糊集合的形式,解模糊是将由推理得到的模糊输出量转化为实际精确的控制量。本文针对温度、压力、流量等模拟量,一是输入量的模糊化程序,利用 MATLAB 模糊工具箱,对锅炉系统进行模糊推理。二是模糊控制查询表程序,用离线计算查询表的方法能增强系统的实时性,在 PLC 的数据寄存器中,依次将模糊控制表按顺序存放,得出不同输入当前时刻的输出控制量。三是 PID 参数输出程序,根据实时的 PID整定参数,进行参数运算,输出参数,有效控制被控量。1
本词条内容贡献者为:
张磊 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国