

旋转机械自动平衡装置主要分为两类,一类为微机控制型;另一类为自动定心型。自动定心型转子自动平衡装置具有结构简单、工作可靠、成本低廉、不需提供外部能源,并且能够对转子不平衡进行自动调节等优点,但具有在亚临界状态会加大转子的不平衡量的特性,使得这类自动平衡装置当必须在过临界转速的状态下运行时,才能起到自动平衡的作用,因此存在不能在全转速下进行平衡调节的缺点,应用中具有一定的局限性,目前多应用于高速旋转机械中。
简介旋转机械的振动问题一直是机械行业的重要课题,特别是现代旋转机械的转子转速不断提高,直接影响旋转机械工作效率和可靠性的振动问题就更为突出。解决这一问题的有效方法就是对其旋转部分( 即转子) 进行高精度的动静平衡,其平衡理论的宗旨就是通过改变转子本身的质量分布来达到其主惯性轴与旋转轴相重合,从而降低旋转机械的振动。1
工作原理、平衡特点自动定心型转子自动平衡装置根据所采用的自由移动补偿质量的形式分为滚球式、摆锤式和充液式等几类。它们都是根据柔性转子和弹性支承的特性而设计的,不需要外部专门提供能量,利用系统响应所形成的能量来驱动平衡质量的运动,从而达到减振的效果。
1、滚球式自动平衡装置
(1)滚球式自动平衡装置的工作原理
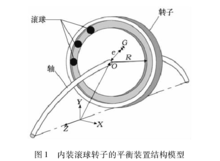
滚球式自动平衡装置是根据柔性转子和弹性支承的特性设计的,利用系统响应所形成的能量来驱动滚球的移动和分布,滚球的移动和分布也会影响不平衡转子的振动情况。内装滚球转子的平衡装置结构模型如图 1 所示,转子是一个带有滚道的圆盘,圆盘中心开有孔,与转轴固联。圆盘中心位于点O。在点G处存在一个偏心质量 m1,偏心距为e。滚球放入圆盘周向的滚道内,滚道内有润滑液,滚球仅能沿滚道做周向运动,球的数量一般在2个或2个以上。
通过大量的实验观测和理论分析,以及 MATLAB数值仿真分析表明,球式自动平衡装置的转子在亚临界加速阶段,由于切向惯性力的存在,在共振区附近时,振动幅值达到峰值,中间叠加着自激振动,自激振动发生在略大于固有角频率的某一频率范围内; 在过临界转速以后滚球远离偏心质量,迅速接近平衡位置,起到自动平衡的作用。因此对于运行在过临界转速下的旋转机械有较好的减振效益,尤其是当转子的旋转角速度大于其共振角速度时,滚球式自动平衡装置能够完全起到自动平衡的作用。但是制约这一平衡器自同期效果的就是当转子处于亚临界转速时反而会使振幅增大。所以在以后的科研工作中,如何解决在一阶临界以下频段减小或至少不增大转子初始不平衡的问题,将成为此类自动平衡器自同期现象的技术关键。目前已有研究将滚球式自动平衡装置应用于磨床磨头、光盘驱动器以及手持式动力工具中。
(2)滚球式自动平衡装置的特点
1) 滚球式自动平衡装置在高速状态下能很好地起到平衡作用,不管偏心量大小,也不需要使用者调试和控制,平衡作用是自动发挥的,而且在一定条件下能完全平衡。
2) 滚球的滚动摩擦因数μ将影响球的安定位置,进而成为影响残余振幅的决定性参数。可选用光滑、质硬的材料制造滚道和球,以便减小μ,但μ过小则使球不易稳定。
3) 滚球的黏性阻力系数会影响最大振幅和自激振动的程度,但与残余振幅无关,因此可取较大的黏性阻力系数来减少最大振幅和自激振动。
4) 滚球式自动平衡装置不能使用于低速和共振状态。
2、摆锤式自动平衡装置
(1)摆锤式自动平衡装置的工作原理
摆锤式自动平衡装置利用了转子的自动定心原理。摆锤式自动平衡装置力学原理如图所示,图所示为具有两个摆锤的转子平衡装置,每个摆锤均可绕其各自的铰接点转动。
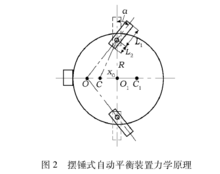
在理想的无偏心情况下,点O1为回转中心( 与质心点C重合) ,摆锤在离心惯性力的作用下将沿径向排列,如图中虚线位置。此时摆锤不起平衡或偏心的作用。而在有偏心距的情况下,点O成为回转中心,摆锤将沿点O的射线方向排列,如图中实线位置。从圆盘中心点O1来看,根据转子振动中的自动定心原理可知,在过临界转速下运行时摆锤所处的位置远离质心C,起到了减少原始偏心距的作用,从而实现了平衡减振; 而在亚临界转速下运行时,质心的位置是在图中的点C1位置,摆锤所处的位置偏向质心C1,加剧了偏心的程度,使振子系统的振幅增加,这对于系统是不利的。如何解决转子在亚临界转速下的自动平衡将是研究的关键点。锤式破碎机是摆锤式自动平衡装置实现减振的典型机构。
(2)摆锤式自动平衡装置的特点
1) 摆锤式自动平衡装置在高速状态下能很好地起到平衡作用,平衡作用是自动发挥的。
2) 摆锤的摩擦因数将影响摆锤的位置,进而成为影响残余振幅的决定性参数。可选用光滑、质硬的材料制造销轴和摆锤。
3) 摆锤式自动平衡装置不能使用于低速和共振状态。
3、充液式自动平衡装置
(1)充液式自动平衡装置工作原理
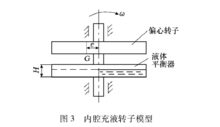
内装部分液体的转子是自动平衡装置的另一种形式,被广泛应用于洗衣机和液力偶合器中,以实现自动平衡和减振的作用。内腔充液转子模型如图所示,m1为偏心质量,e为偏心距,m2为转子质量,m3为液体质量,ρ为液体密度,H为液体平衡器的厚度,G为转子质心。
当回转频率ω在共振频率ωn(即K/(m1+ m2),K 为系统刚度系数) 附近时,液体在一定条件下将发生自激振动,使系统处于不安定状态。然而,在大多数情况下,工程机械的回转频率均设定在远离共振频率的频域之中,由于液体的黏性作用,当系统以 ω 转速转动时,其中液体的转速将逐步提高,最后达到同步转速。与此同时,由于惯性离心力作用。液体被抛向回盘外沿。中部附近将出现空洞。
通过受力分析和推导,当 ω≥ωn时,偏心质量与轴线弯曲方向相反,说明液体起到了衰减振幅的作用。由此可见,在过临界转速下运行时,液体起到了自动平衡的作用; 但其同样存在当转子处于亚临界转速时反而会使振幅增大的弊端。
(2)充液式自动平衡装置的特点
1) 充液式自动平衡装置在高速状态下能很好地起到平衡作用,平衡作用是自动发挥的。该装置不能使用于低速和共振状态。
2) 与球式和摆锤式的“自动平衡装置”相比,充液式自动平衡装置结构简单,制作精度不高,造价低廉;但它只能减振,滚球式自动平衡装置在理想情况下却能完全消除振动,即完全平衡。
3) 充液式自动平衡装置可以有多种安装方式,通用性强。1
三种自动平衡装置的减振效益为了能定量地表征滚球式、摆锤式及充液式自动平衡装置的减振效益,用减振倍数 A 作为衡量指标,它是偏心转子安装自动平衡装置前后的振幅比。通过课题组近几年的大量试验观测和理论计算得出三种平衡装置的减振效益如下。滚球式减振效益最好,当滚球的总质量之和大于偏心量时,且ω>ωn,球远离偏心质量,起到平衡作用。如果在没有摩擦力的理想情况下,滚球可以使转子达到完全平衡,振动将被完全消除。自动平衡装置的减振倍数A将达到无穷大。摆锤式在没有摩擦和合理几何参数的理想条件下,减振倍数A远大于1(转子质量与摆锤质量之比) 。充液式减振效益相比之下较差,减振倍数仅为总质量与转子质量之比,一般情况下转子质量较大,故充液式减振倍数是介于1和2之间。相比之下: 滚球式平衡效果最好,摆锤式次之,充液式较弱。但滚球式需要安装专门的高精度滚道,对加工工艺精度要求较高; 摆锤式可以考虑在原转子上直接悬挂摆锤即可,安装较便捷; 充液式结构简单,制作精度不高,造价低廉。因此,在具体应用时结合工艺系统、经济成本等多方因素综合考虑,择优选择。1
本词条内容贡献者为:
李雪梅 - 副教授 - 西南大学

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国