

人工神经机器人是基于神经科学和机器人技术的新型机器人系统,以生物神经系统作为信息接口,对生物体-设备-环境三者进行闭环信息融合,达到对生命体某些生理机能的补偿、增强或拓展需求。
概述人工神经机器人系统作为新型的机器人系统,是神经科学与传统机器人技术交叉结合的产物。该系统通过人或动物的生物神经系统作为信息接口,完成人或动物机体与传感器或执行器等外部设备的信息交互,从而达到对某些生理机能的补偿、增强或者拓展。近年来,对神经科学的研究不单纯只针对于中枢神经系统,而是扩展到了人体与外界环境的交互作用中[1]。人工神经机器人系统也不是一个单独存在的机器人系统,而是依托于生物体的神经系统、外部设备和环境三者之间的交互而存在的混合系统[2],特别是神经系统和外部设备之间的交互作用尤为重要,这需要对神经系统信息进行正确解码,从而控制外部设备的工作状态,还需要对设备反馈信息进行神经编码,向神经系统进行发送,从而组成双向闭环融合[3]。在符合中枢神经可塑性的学习机制下,将人工神经机器人系统与人体信息系统进行有机融合,可以通过不断学习训练来提高人体对系统的适应性程度,更高的发挥系统效能。人工神经机器人的应用范畴主要可以分为认知、记忆、感受和执行四个方面,包括各类神经假体等[3,4]。
发展历程生物神经系统的研究起步较早,且主要以中枢神经系统的行为机制为核心。随着研究的不断加深,感觉输入和运动输出与中枢神经系统的匹配响应受到了极大重视,并且逐步扩展到中枢神经系统、身体各感受执行器和环境之间的双向多维交互作用[1](如图-1)。而新兴的人工神经机器人作为介入生物神经系统工作环路的系统(植入式系统和非植入式系统均属于该范畴),通过准确解码神经通路的信息来控制外部设备,并通过编码外部设备的反馈信息作用到神经系统[5,6] ,这属于具现电生理学(Embodied Electrophysiology)的范畴[7,8](如图-2)。人工神经机器人系统在与生物神经系统的交互工作过程中,不但需要体现信息融合的动态行为学特性,还需考虑中枢神经具有可塑性的特点[9],生物神经系统和人工神经机器人的工作方式可以相互适应和学习。
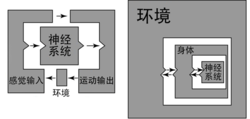
图-1 神经系统-身体感受执行器-环境的多维交互

图-2 具现电生理学的概念组成结构
人工神经机器人系统是结合了神经科学和机器人技术的新型机器人系统,目前主要可以分为以下三个层次:首先是单神经元层面[2],连接了单个人造神经元和实际神经元,具有简单的信息传递功能;然后是神经元集群层面[10],通过神经元集群的适应性机制,动态管理神经元集群的功能;最后是“器官”层面[11],人工设备直接连接部分神经组织,达成组织器官的复杂功能。
应用从感觉到动作:
伴随着悠久的生物进化过程,地球上出现了多种多样的生物物种。每种动物都进化出了适应其特定生存环境的脑和身体,因此人们会想到通过观察动物特定的神经行为来获取灵感,并以此制造可以实现特定目的的人工神经机器人。
哺乳动物的上丘不仅能够实现视觉目标的扫视和快速眼球运动的功能,而且可以把听觉和体觉信息集成到视觉框架里。基于上丘神经元的这些功能属性,Strosslin[12]等人使用生物启发的手段,研究动物体视觉与触觉信息之间的关系,并将其运用到控制移动机器人平台的开发中。在灵长类动物视觉注意的研究中,Itti和Koch[14]建立了一种自上而下指导注意力的神经形态模型。Orabona[13]等人其研究的基础上进一步地深入,他们把一个扩展的Itti-Koch模型应用到了类人机器人上。这一机器人具有可移动的眼睛[15],使用对数-极坐标视觉,而且可以通过考虑主要目标元素来改变特征架构。
神工一号[16],是天津大学研制的人工神经康复机器人,是全球首台适用于全肢体中风康复的“纯意念控制”人工神经机器人系统。该系统在中风患者体外仿生构筑了一条完整的人工神经通路,它通过模拟中枢神经通路、解码患者的运动意念信息,进而驱动多级神经肌肉电刺激技术模拟周边神经通路、刺激患者瘫痪肢体产生对应动作,从而完成主动康复训练对皮层、肌肉活动的同步整合与协同。
神经假体:
动物体的感觉、运动或认知等模式会由于受伤或疾病而遭到损坏,神经假体是指可以替代这些受损模式并实现其功能的一系列设备的统称[17]。神经假体主要包括感觉神经假体、运动神经假体、认知神经假体和记忆神经假体。
其中,感觉神经假体又包括视觉神经假体、听觉神经假体、味觉神经假体以及触觉神经假体。最为常见的设备有人工耳蜗、电子舌[18]等。
运动神经假体是一类植入人或动物体内替代其原有受损的运动机能,并辅助恢复运动功能的高科技电子装置。一般包括排泄神经假体、膈肌起搏器、手功能神经假体和站立行走神经假体。运动神经假体中一项较新的技术就是“目标肌肉神经重置”(Targeted Muscle Re-innveration,TMR)[19],它属于神经肌肉接口技术的范畴,是由美国国防部先进研究项目局发布的一项具有突破性进展的技术。但是,目前该项研究仅能应用于四肢瘫痪者。
深度脑刺激是认知神经假体中代表性较强的一种技术,他可以缓解帕金森疾病的症状。该类装置能够通过模拟人体中促进多巴胺合成的自然信号,促使人体产生多巴胺,从而缓解帕金森病人的症状[20]。
记忆神经假体[21]是一种可植入脑部海马区的记忆设备。当该设备工作时,它会观察某一记忆在一部分海马体内如何形成,随后刺激海马体的另一部分让其复制该过程。该技术被评为“2013年度十大突破性技术”[22]。
本词条内容贡献者为:
明东 - 教授 - 天津大学精密仪器与光电子工程学院

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国