

简介
火星是太阳系中唯一勉强与地球相似的行星,也是除地球外唯一有可能进化出生命的行星(另外可能孕育生命的星球还有冰冻的木卫二,但它只是木星的一颗卫星,并不是行星)火星是人类在太阳系中有希望在不久的将来实现登陆、行走并以传统方式进行探索的唯一颗行星,也是唯一可能被地球化而成为类似于地球的行星。
正是因为以上各种原因,人类已经向火星发射了30余艘不同的探测飞船。NASA(美国国家航空和航天局)的火星探测车“勇气号”和“机遇号”是火星比较近的两个造访者。2011年11月26日23时2分,“好奇”号火星车发射升空,随后顺利进入飞往火星的轨道,发射取得圆满成功。
为何不将人送上火星最近的火星探测任务包括一对机器人探测车,称为火星探测车(MER)。为什么要把机器人送上火星而不是像探月那样直接把人送上去?我们尚不具备将人送上火星的能力。这种谨慎的态度不是没有理由的。首先也是最重要的原因在于我们探索火星的历史记录不容乐观——各国总共向火星发射了30多个探测器,但只有不到三分之一成功抵达了火星。这显然不是什么好的记录,它无法鼓励我们把机器人探测器换成人类,至少在我们提高成功几率之前是这样。
其次是成本。目前将一公斤重的机器人送上火星需要花费约五十万美元的设计和发射费用,而机器人不需要考虑复杂的生命保障系统,也不用担心返回的问题——这将为飞行任务节省很大的重量。另外,机器人不需要在火星表面软着陆。而要将一个小组的人员送上火星需要至少45,000公斤重的飞船、装备、食物和水(例如,每一个人将需要408公斤以上的脱水食品)。按照每公斤五十万美元计算,则总共花费1,000亿美元。而实际上,载人探测任务的单位重量成本很可能要高于机器人任务,因为需要为乘员保留相当大的安全裕度。 第三个原因来自工程上的挑战。例如,要实现载人探测,一个可能的情形是要从火星大气中生产回程的燃料。然而至今还未进行过任何相关的尝试,甚至还需要通过多次试验性探测飞行来验证这种想法。另外一个重要的考虑是,在如此漫长的任务中宇航员可能受到的太空辐射以及阻挡辐射的方法。在地球上,地磁场阻挡了大部分的辐射,而火星没有地磁场。
第三个原因来自工程上的挑战。例如,要实现载人探测,一个可能的情形是要从火星大气中生产回程的燃料。然而至今还未进行过任何相关的尝试,甚至还需要通过多次试验性探测飞行来验证这种想法。另外一个重要的考虑是,在如此漫长的任务中宇航员可能受到的太空辐射以及阻挡辐射的方法。在地球上,地磁场阻挡了大部分的辐射,而火星没有地磁场。
综合以上原因,人类近期还不会将人送上火星。但是我们仍然可以用机器人来代替作业。火星探测车(MER)机器人就是这种思路的体现。
实际上,保证探测车在到达火星以后仍然可以工作是火星探测任务中最棘手的一环。设想在没有任何减速措施的情况下,尝试将一台复杂的机器人从10层楼扔下却又要使它保持完好无损(或者换成一台普通的DVD播放机)。这比起将探测车送上另外一颗行星上来说简直是不值一提。
火星车的性能20世纪70年代,NASA发射了一对“维京号”火星登陆器,当时所有的星际机器人都具有三个基本组成部分: (1)能够产生执行任务所需的能量;(2)能使用传感器收集信息;(3)能将收集的信息传回地球。
(1)能够产生执行任务所需的能量;(2)能使用传感器收集信息;(3)能将收集的信息传回地球。
维京号”火星登陆器拥有可以伸出机械手来铲土,但是它们不能移动。
NASA首次实现移动的突破是在1997年火星探路者任务中。那是一台小型的探测车(仅重11公斤),能够离开探路者探测器运行5米并查看周围的岩石。火星探测机器人是迄今为止在其他行星上实现成功着陆的最大的探测车。在这类任务中,NASA设计的MER机器人工作起来就像是一个机器人地质学家。探测车装载的仪器设备的首要目的是研究岩石。
以下是探测车的功能:
 (1)探测车能够利用自身的太阳能电池板发电并将其储存到电池中;(2)利用装在桅杆上的一对高分辨率照相机,探测车可以拍摄立体的彩色地形照片;(3)探测车上装有独立的热辐射光谱仪,该光谱仪利用桅杆作为潜望镜以获得热学数据。
(1)探测车能够利用自身的太阳能电池板发电并将其储存到电池中;(2)利用装在桅杆上的一对高分辨率照相机,探测车可以拍摄立体的彩色地形照片;(3)探测车上装有独立的热辐射光谱仪,该光谱仪利用桅杆作为潜望镜以获得热学数据。
科学家选择地表上的一点,探测车就可以移动过去。探测车是独立运行(自动驾驶)的,因为无线电信号在地球和火星间传播的时滞太长,不适合使用遥控操作。探测车的前部、后部和桅杆上的三对黑白摄像机能使探测车看清楚周围的状况并实现导航以避开障碍物。探测车有6个轮子,每个轮子配有一台发动机驱动探测车移动。
探测车的小机械臂上装有一台钻孔机,探测车可以用它在岩石上钻孔。这种钻孔机的官方名称叫岩石打磨工 具(RAT)。探测车上有一个显微照相机,与钻孔机安装在同一机械臂上,科学家可以利用它来仔细观察岩石的微细结构。
具(RAT)。探测车上有一个显微照相机,与钻孔机安装在同一机械臂上,科学家可以利用它来仔细观察岩石的微细结构。
探测车还有一台质谱仪,能够探测到岩石中含铁矿石的成分。质谱仪也安装在同一个机械臂上。
另外,机械臂上还装有阿尔法粒子和X射线分光计,用于侦测土壤和岩石放射的阿尔法粒子和X射线。根据岩石的这些性质能帮助确定它的成分。
探测车上三个不同的部位都装有磁铁。含铁砂粒会粘到磁铁上,这样科学家们就可以分别使用相机和分光计对它们进行观察和分析。
探测车上有三架不同的无线电天线,可以选择任意一个将所得数据传回地球
火星探测车的规格要装下所有这些仪器设备、马达系统和发电器件要求探测车的尺寸很大——约有一台小型乘式割草机那么大。以下是相关数据:
 1.5米高(包括上面的桅杆);2.3米宽;1.6米长;174公斤重
1.5米高(包括上面的桅杆);2.3米宽;1.6米长;174公斤重
最大速度:可能是30米/小时,每天最多行进100米。
全景照相机:
Pancam是一种多光谱的立体全景成像系统,包括两架置于桅杆上的数码照相机(位于火星地表上方1.5米处)。Pancam系统可以利用桅杆实现360度全方位和在正负90度的俯仰角下进行拍照。每个Pancam照相机使用一个有效成像面积为1024×1024的CCD监测器阵列。Pancam照相机有一个16×16的视野。 造价:一共大约是8.2亿美元(两辆探测车)+用于设计/开发环节的6.45亿美元+用于Delta运载火箭及发射的1.00亿美元+用于探测操作的0.75亿美元。
火星探测车内部探测车的车身是一个叫做电子恒温箱(WEB)的封闭箱体。这个箱子的作用非常关键,因为火星表面温度在夜间会降低到零下100摄氏度。如果不采取任何保暖措施使温度维持在零度以上,则电池和很多电子原件都会停止工作。 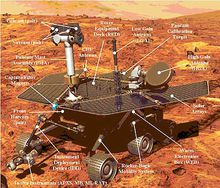 WEB箱是一种隔热箱,内含探测车的计算机中枢、锂电池、无线电及其放大装置、控制各种分光计等仪器的电子设备。基本上,所有无法抵御零下100度低温的器件都被置于恒温箱中。
WEB箱是一种隔热箱,内含探测车的计算机中枢、锂电池、无线电及其放大装置、控制各种分光计等仪器的电子设备。基本上,所有无法抵御零下100度低温的器件都被置于恒温箱中。
恒温箱通过三种不同机制实现保温:
(1)工作状态下的各电子模块本身可以产生热量。以计算机为例,它的功率为7瓦,所以产生的热量与一盏7瓦电灯泡相当。
(2)计算机可以打开多个功率为1瓦的小型电阻加热器来提升温度。
(3)八个放射球(二氧化钚)中的钚原子发生衰变时能产生热量。这些球非常小——只有豌豆大小。小球被防辐射合金包裹着,装在碳纤维盒子中。一旦运载火箭Delta中途炸毁,或者飞船重新返回了大气层,这些盒子能够保证小球不发生核泄漏。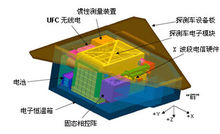 车载计算机
车载计算机
探测车使用的是一台BAE systems公司生产的RAD6000型计算机。其处理器与早期Macintosh计算机使用的老式PowerPC处理器在结构上几乎是完全相同的。从今天的标准来看,这种处理器的速度很慢,只有20兆赫,大约是今天普通台式计算机速度的百分之一。它有128KB的RAM内存,256KB的闪存,以及用于存储启动代码和操作系统的ROM。该机没有磁盘驱动器。虽然这种计算机速度很慢而且非常昂贵(每台20到30万美元),但是它们有两大优点:耐辐射和能够抵御火星上的太空辐射。
采用Wind River Systems公司的VxWorks(PDF)实时操作系统,这是一个非常可靠的系统。
这种计算机使探测车的可靠性远远高于普通的台式计算机。这样做的原因是要保证探测车不会出现任何数据 丢失或错误的现象。
丢失或错误的现象。
计算机帮助探测车进行能源管理、图像处理、发动机控制和仪器设备管理。另外还负责导航任务。探测车有3对共6台导航摄像机,每组摄像机得到的立体图像都要交由计算机处理。利用双目视觉算法,计算机能够辨认出视野中不同岩石的大小以及距离。利用这些信息,计算机可以绘制出包含附近所有障碍物的地图,并操纵探测车在移动时避开障碍物。
探测车上装有1.3平方米的高效率太阳能电池板来提供电能。探测车首次展开时,电池板很干净。由于季节的原因,正午时分的太阳辐射非常强烈——以火星上的标准来说。电池板的高峰发电功率大约是140瓦特,也就是每天发电约0.9千瓦时(用这些电能可以维持一盏100瓦的照明灯泡工作9个小时)。换言之,每个火星日当中只有6个小时的太阳光的强度足够支持太阳能电池板工作。
太阳能电池板将产生的电能提供给耗电器件(计算机、发动机、岩石打磨工具以及无线电装置等等)。剩余的电能被储存进两块28伏、10安培小时的锂电池中。
火星探测车的动力装置1970年maxon电动机公司向市场推出了12-32mm直径的电动机系列。那时候,人们对这种技术还并不真正了解,人们虽然可以期待获得较高的效率,但是工业界对于其适用性还不是太相信。但是maxon电动机公司的产品慢慢地底得了市场。由于产品不断地改进,并且不断推出新的驱动装置和驱动系统,maxon电动机公司在世界上渐渐出名。1
这家瑞士的驱动装置专家最大的挑战是火星探测车。在“ 探路者”(1997年发射)号上就有1台maxon公司的电动机作为行驶和控制用的驱动装置。和探星上着陆的“精神”号和“机会”号火星车上各安装了39 台maxon公司的电动机,用于执行各种不同的任务。探测器本身没有地面站,只是由一个用着陆装置运输到火星上的巡回车组成。当巡回车离开了着陆装置之后,着陆装置就没有什么用了。185kg的火星巡回车根据火星表面的情况最多一天可以行走100m。这比“探路者”号火星车的行走距离要大60倍。JuegFen Mayer 对使用的电动机的质量非常有把握,因为这第二次火星探测任务一开始只准备持续90天,而现在“ 精神”号计划已经进行了两年多了。2005年4月美国航空和航天管理局(NASA) 宣布,该计划再延长18个月至2006年9月才结束。1
机器人探索火星设想地球上的科学家选中了一块岩石,并命令探测车移动到足够近的位置使机械臂够得着目标。对于接下来发生的事,这篇Cornell News文章(2003年12月19日)进行了描述:
由于暴露于太阳、火星大气以及细微的火星尘埃下长达数十亿年,火星岩石上都覆盖了一层风化“外衣”,或称外表层。对此,“勇气号”和“机遇号”探测车携带的科学工具包中包括了岩石打磨工具(RAT)。岩石打磨工具使用一个带有金刚石钻头的自动磨削工具将岩石的风化外层磨掉,露出崭新的表面。
接触到岩石内部的原始部分对于解决以下两个问题是至关重要的:一是了解火星的地质历史;二是解决巴特利所宣称的“重大问题”,即这颗红色行星上是否曾经存在过水或者适合生命生存的环境?
这些重大问题的解决很可能要依靠一台很小的仪器:这种岩石打磨工具的重量只有0.68公斤,消耗的功率(仅30瓦)还不及大多数的电灯泡。其尺寸与一个可乐罐的大小相当。
岩石打磨工具位于探测车机械臂的前端(或称“手部”),同在那里的还有其他分析岩石的科学仪器、一台显微照相机、Mössbauer质谱仪和阿尔法粒子及X射线分光计。机械臂和人的上肢一样也具有肩关节、肘关节和腕关节,所以非常灵敏。工作时,岩石打磨工具被机械臂压在岩石的表面。
仅需两个小时,岩石打磨工具的磨削轮就可以从坚硬的岩石表面磨出一个直径和厚度均为两个5分镍币的圆孔。然后用两把刷子将孔中的岩屑扫干净,露出新鲜的表面以便近距离观察。
之后,照相机和分光计接手工作,透过磨削孔对岩石内部进行仔细的分析。为了让科学家了解岩石可能经历的风化过程,探测车还会纪录岩石打磨工具磨削岩石表层的时候三个马达的温度和实时数据。
火星探测车通信探测车收集到的数据还需要传回地球。所谓的数据包括照片、光谱信息和系统状态信息等等。另外,地面上的科学家和工程师们也需要向探测车传送指令和软件升级等数据。探测车有三种不同的无线电来负责通信。
第一种是低能耗、低速的UHF无线电。这种通讯的连接方式使用低增益、全方向的天线。该天线不需要任何定向,能以较低的数据率把数据传回地球或传给人造卫星。这是一种“万不得已”时的通讯方式。
第二种是高速UHF无线电,负责和两颗已运行在火星轨道的卫星进行通讯——“火星奥德赛”和“火星全球勘测者”卫星。当一颗卫星出现在探测车上空时,探测车会把数据快速注入卫星,持续的时间大概为8分钟(每次卫星通过时)。探测车能以每秒128Kbit的速度发送数据,使用的无线电功率为15瓦。接着,当地球出现在卫星视野中时,卫星利用2.5米长的天线和100瓦功率的无线电设备再将数据传回地球。这就是大部分照片数据返回地球的方式。每天通过这些通道传回地球的数据可达10MB。最后是探测车上直径0.3米的定向(高增益)天线。当地球出现在探测车视野范围内时,探测车天线能追踪到地球并实现与地球上的科学家和工程师的直接通讯。由于地球与火星之间距离为3.22亿公里,所以通讯时会有20分钟的往返延时。探测车使用40瓦的无线电,每分钟只能传递12Kbit的数据。因为这是一种直接连接,所以NASA用它来向探测车发送指令和接收重要数据。然而,由于行星的排列以及无线电所需能量等原因,这种连接在一天当中的可用时间只有3个小时。
火星探测车一天的工作通常在一天当中,每台探测车会向地球发送照片、仪器数据和状态数据。科学家根据当天及前一天的数据来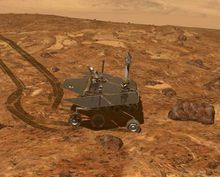 做出相应的决策。然后科学家借助高增益天线,透过3个小时的直接通讯窗口,将指令发送给探测车。在接下来的20个小时内,探测车自行工作,包括执行指令并将数据传给上空的两颗卫星。探测车的指令可能是命令它前往一块新的岩石、磨削岩石、分析岩石、拍摄照片或者使用其他仪器搜集数据。在为期大约90天的时间内探测车和科学家们都将重复这样的工作模式。之后,探测车的能量开始衰竭。同时,火星和地球的距离将会越来越远,给通讯带来更大的困难。最后,当探测车没有足够能量或者距离太远导致无法通讯的时候,探测任务便宣告结束。
做出相应的决策。然后科学家借助高增益天线,透过3个小时的直接通讯窗口,将指令发送给探测车。在接下来的20个小时内,探测车自行工作,包括执行指令并将数据传给上空的两颗卫星。探测车的指令可能是命令它前往一块新的岩石、磨削岩石、分析岩石、拍摄照片或者使用其他仪器搜集数据。在为期大约90天的时间内探测车和科学家们都将重复这样的工作模式。之后,探测车的能量开始衰竭。同时,火星和地球的距离将会越来越远,给通讯带来更大的困难。最后,当探测车没有足够能量或者距离太远导致无法通讯的时候,探测任务便宣告结束。
MSC Adams助力“好奇号”执行火星任务MSC Software Corporation日前宣布,在好奇号探测车出色完成的下降和着陆火星的任务中,该公司的Adams多体动力学软件从中扮演了至关重要的角色。NASA喷气推进实验室(JPL)的工程师团队曾对天空起重机的操作序列进行了一系列重要的计算机仿真。JPL团队成功、精确地将探测车降落到这个红色星球上,众人称之为“巨大的技术成就”。2
JPL在Adams上进行的计算机仿真对于此次着陆任务而言是不可或缺的。例如,探测车分离期间,在下降速率限制器(DLR)/束带布放的“双体”阶段必须防止探测车与飞行器相互碰撞或接触。借助Adams,工程师们能够对这一极其重要的过程进行建模并仿真。2
除分离过程以外,Adams仿真还被用于研究从有动力下降直至触地的整个过程。飞行器携带的探测车以每小时13000英里的速度飞行,必须减速以便天空起重机把探测车安全降落到火星表面。JPL的工程师团队建立了若干Adams子模型,其中包括高度逼真的探测车细节模型。这些工作比以往的探测车建模困难数倍,包括开发移动布放的模型、探测车分离的模型以及着陆触地的模型。2
勇气号和机遇号火星车定位方法评述在美国国家航空航天局(NASA)2003火星探测车任务中,勇气号(Spirit)和机遇号(Opportunity)火星车携带相同的科学和工程仪器于2004 年1月4 日和25 日分别在古谢夫陨石坑(Gusev Crater)和梅里迪亚尼平原(Meridiani Planum)成功着陆,业务化运行至今(2009年6月底)已近5 年半的时间,在科学发现和工程实施方面都取得了空前的成功,而高精度的火星车定位对安全行驶及科学目标和工程目标的实现发挥了关键性的作用。勇气号和机遇号火星车的定位运用了无线电测控定位、航迹推算、太阳图像确定方位角、视觉测程、光束法平差定位、地面影像与高分辨率卫星影像对比等多种方法,每种方法都有其自身的优点和局限,多种方法的优化组合保证了定位信息的及时、精确。3
无线电测控定位勇气号和机遇号火星车用其无线电系统同地球跟踪站直接通信或与火星轨道器通信,根据无线电信号的多普勒频移来确定火星车在火星惯性参考系统中的位置。通过多次重复测控定位,火星车在惯性参考系统中的定位精 度可达1-10m。无线电测控确定的火星车位置可以转换到星固参考系统中,转换精度为±250m。3
度可达1-10m。无线电测控确定的火星车位置可以转换到星固参考系统中,转换精度为±250m。3
勇气号火星车着陆后,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)导航团队把第2个火星日至第4 个火星日地球测控站直接得到的双向多普勒信号以及勇气号与奥德赛轨道器在两次通信窗口得到的双向多普勒信号联合处理,得到了着陆器的位置(即火星车初始位置)。机遇号着陆器的定位也采用了相同的方法。在勇气号的第94 至98 火星日位置、机遇号第75 至第78 火星日位置火星车原地不动实施软件更新上载任务,无线电测控定位方法在这两个位置再次对火星车进行定位。着陆点和软件更新位置也通过卫星图像中地物识别和平面三角交会的方法定位。将无线电测控定位位置转换至星固参考系统并与基于卫星图像定位的位置相比较发现,两种定位方法勇气号两个位置的差别均为370m左右,在机遇号的两个位置均为135m左右,表明两种方法都精确、可靠,两种方法得到的位置的差别主要来源于惯性参考系统和星固参考系统转换带来的误差。此后,无线电测控定位方法还用于少数几个火星车停留了较长时间的关键位置。3
无线电测控定位方法的优点是全局绝对定位,缺点是无法实现实时自主定位。应当结合其他方法使用,并消除惯性参考系统和星固参考系统坐标转换带来的误差。适合用于着陆器定位和火星车停留较长位置的定位。
航迹推算航迹推算法(Dead Reckoning)基于里程表和惯性导航器件(Inertial Measurement Unit , IMU)计算火星车的位 置和姿态,不依赖于外界环境信息,是一种车上实时自主定位方法。勇气号和机遇号火星车所用IMU是Litton LN-200型,由表面姿态位置及指向(Surface Attitude Position and Pointing,SAPP)软件以8Hz的频率计算和更新其姿态和位置,其中姿态更新由三轴加速度计和三轴陀螺仪量测,位置由IMU和里程计转数共同计算。SAPP软件获取火星车位置的设计精度为行驶距离的10%,即在100m的行驶距离累积定位误差不超过10m。3
置和姿态,不依赖于外界环境信息,是一种车上实时自主定位方法。勇气号和机遇号火星车所用IMU是Litton LN-200型,由表面姿态位置及指向(Surface Attitude Position and Pointing,SAPP)软件以8Hz的频率计算和更新其姿态和位置,其中姿态更新由三轴加速度计和三轴陀螺仪量测,位置由IMU和里程计转数共同计算。SAPP软件获取火星车位置的设计精度为行驶距离的10%,即在100m的行驶距离累积定位误差不超过10m。3
航迹推算法的优点是功耗小、自主性强、计算简单、相对廉价,缺点是IMU随时间漂移及车轮打滑在长距离导航定位中会产生较大误差,例如在勇气号着陆区的哥伦比亚山、机遇号着陆区的鹰坑(Eagle Crater)和耐力坑(Endurance Crater)上坡时出现过严重的打滑现象,其中在哥伦比亚山上坡时有一次高达125%的车轮打滑(指令是向前行驶,实际打滑到后面)。根据其固有的优缺点,航迹推算法作为基本的车上实时定位方法仍然会被广泛应用,当有条件应用其他精度较高的方法时再对其定位误差进行定期或不定期的改正。3
太阳图像确定方位角勇气号和机遇号火星车还用其Pancam作为太阳敏感器获取太阳图像,确定图像中太阳质心位置,计算相对于火星车参考系统的太阳方位角和高度角,然后利用太阳星历表和太阳时计算太阳方位角和高度角,通过两组姿态的关系计算火星车相对于正北方向的绝对方位角,改正IMU随时间漂移带来的方位角累积误差。根据在地球上的测试,用太阳图像确定方位角的精度为±3°。这一方法无法单独用于探测车定位,未来的月球车和火星车探测任务中应与航迹推算法结合使用,用于不定期地改进方位角测定精度。3
视觉测程视觉测程法(Visual Odometry,VO)基于连续拍摄的导航相机立体像对在二维影像平面和三维地面空间追踪特征点并估计相对的位置和姿态实现车上实时定位,改正由航迹推算方法在车轮打滑时带来的较大定位误差。JPL开发的VO算法的基本过程是:1)在第一个立体像对上用Förstner算子提取特征点;2)用相关系数法在第一个立体像对上进行特征点匹配,并用双二次方内插方法将匹配位置定位到子像素,计算匹配成功的特征点三维坐标;3)根据航迹推算获得的第二个立体像对的位置和姿态将这些三维点投影到第二个立体相对中,用相关系数法匹配实现特征点的追踪并计算新的三维坐标;4)用RANSAC方法在计算两组三维点六自由度刚性变换过程中剔除匹配和追踪的粗差,最后用最大似然估计计算第二个立体像对相对于第一对立体像对的位置和姿态变化,进而获得火星车在前后两个位置间的位置和姿态变化;5)对新获取的立体像对重复以上过程,更新火星车位置和姿态,若提取和追踪的特征点数量不足或最终的位置和姿态估计不收敛,则不更新而沿用航迹推算法得到的位置和姿态。3
为了保证前后立体像对间有较大的重叠和较小的目标形状变化,相邻像对间拍摄间距不超过75cm,摄影方位角的变化不超过18°。由于火星车上计算机速度的限制,获取和处理一个立体像对并更新位置和姿态需要近3min的时间,速度太慢,因而VO无法用于勇气号和机遇号的全行程,而是用于部分短距离关键路径上的局部定位(一般小于15m),如预计车轮打滑时、接近指定的科学目标时。3
JPL曾在地球上模拟火星环境下多次试验验证视觉测程法的有效性和精度。在“火星庭院”的一次典型试验中,火星车行驶了24m,VO定位误差小于2.5 %;在“约翰逊山谷” 的一次29m行驶试验中,VO产生的定位误差小于1.5 %。据JPL研究者的报道,从着陆至2005年3月5日的一年多时间里,勇气号有184个火星日行驶,其中52个火星日应用了视觉测程,计算收敛成功率为97%;机遇号有172个火星日行驶,其中75个火星日应用了视觉测程,成功率为95%。VO不成功的情况一般是没有足够的特征点、特征点分布范围太小、火星车自身阴影的影响等。3
总之,勇气号和机遇号火星车所用的视觉测程方法的优点是自主性强、精度较高,能改正航迹推算方法在车轮打滑和IMU漂移时的定位误差;其缺点是计算速度慢、只能应用于局部定位,成功与否依赖于地形特征。VO速度慢的缺点部分是由于火星车计算机的计算能力限制,未来的火星车或月球车计算机的计算能力应该会强得多。针对在地形特征贫乏情况下VO失败的情况,应开发新的算法并结合其他定位方法予以克服。随着计算机能力的提高和算法的改进,未来的VO定位方法是可以实现快速、全程定位,可望得到广泛应用。3
光束法平差定位美国俄亥俄州立大学制图与地理信息系统实验室开发的基于光束法平差(Bundle Adjustment,BA)的定位方法是将导航相机和全景相机在不同摄站拍摄的图像连接起来构成图像网,通过对图像网的摄影测量光束法平差,提高图像位置和方位参数以及地面点位置的精度和一致性,从而实现火星车的长距离高精度定位。在加利福尼亚银湖沙漠同JPL做的联合野外测试表明,利用降落图像和地面火星车图像联合光束法平差定位精度达0.1%,仅用火星车图像的光束法平差定位精度为0.2%。光束法平差定位方法的优点是不需要短距离连续拍照,可以在火星车整个路径上进行全局定位,定位精度较高,缺点是尚未达到全自动化,目前需要在地球上计算。3
对勇气号火星车的光束法平差定位从着陆点开始一直持续至今,BA改正了航迹推算法在车轮打滑和IMU漂移带来的较大的累积误差。例如:从第154至第670个火星日,勇气号从山脚下爬上了Husband山的山顶并开始下坡,同BA定位结果相比,航迹推算法定位累积误差为67.9m,占行驶距离1.85km的3.7%,其中最大相对误差为10.5%(行驶540.6m 时累积误差56.6m)。由于火星上目前没有GPS 提供精确的地面实况数据,无法精确评估火星车的绝对定位精度。然而,在2005年1月3日发布的MOC NA (Mars Orbital Camera,Narrow Angle)1m分辨率的卫星影像中,可以看到从着陆点到哥伦比亚山的大部分车辙。用此卫星图像中观测到的行驶路线与光束法平差定位得到的行驶路线进行对比,发现在路线终点的差别为12m,约为行驶距离3.08km的0.4%。此误差间接表达了BA定位的精度,其中也包含了卫星影像处理的误差。3
自机遇号在“鹰坑”内着陆至第62个火星日,基于光束法平差的定位处理改正了由于车轮打滑带来的高达21%的定位误差。此后,由于该区火星表面几乎没有岩石等明显特征,行驶距离过长而没有拍摄图像,使得基于BA的连续定位方法无法实施。在能够观测到明显特征(如陨石坑)的地方,用火星车图像产生的正射影像同卫星影像地图对比来对机遇号火星车定位。光束法平差定位方法应当在未来的月球车和火星车探测任务中发挥重要的作用。需要进一步增强该方法,提高自动化程度,关键之一是自动选取相邻摄站间的连接点构成影像区域网。近两年,俄亥俄州立大学与JPL联合开发了基于BA和VO集成的长距离火星车定位技术,在保持高精度的前提下显著提高了自动化程度,并在银湖沙漠进行了测试。3
地面影像与高分辨率卫星影像对比尽管VO和BA方法的定位精度远高于航迹推算法,它们在长距离的定位中仍然不可避免地有误差累积。即使BA 的定位精度为0.2%,10km的行驶路线也会产生20m的累积误差。可以应用高分辨率的卫星图像消除仅利用地面传感器和图像进行火星车定位的误差累积。目前,火星卫星图像的分辨率越来越高,如HiRISE图像分辨率为30cm,为实现这一目的提供了有利条件。可以用火星车图像产生的正射影像同高分辨率图像叠加对比;在多个HiRISE图像中观测到了火星车,可以直接定位消除累积误差;对于勇气号着陆区多石块的特点,可以通过匹配分别从火星车图像和HiRISE图像中提取的石块实现火星车在卫星图像上的定位。在业务化运行过程中,这些方法基本上是以手工方式实现的。中科院遥感所的行星遥感制图与导航定位研究组,近期在地面与卫星影像集成的探测车定位方面取得了积极的进展,实现了地面影像与高分辨率卫星影像的自动配准和和火星车定位,定位精度优于卫星图像一个像素(HiRISE图像30cm)。3
中国首个火星探测车设计图公布2016年8月23日,“中国火星探测工程名称和图形标识全球征集活动启动仪式暨新闻发布会”在京召开。发布会上,官方首次公布了火星探测器和火星车的外观设计造型。火星是太阳系中离地球较近的行星,且自然环境与地球最为类似,是人类开展行星际探测的首选目标。中国首次火星探测任务将于2020年实施,一步实现“绕、着、巡”的目标。4
国家国防科工局探月与航天工程中心2016年8月23日发布中国第一个火星探测器和火星车外观设计构型图。中国首次火星探测任务工程火星探测器总设计师孙泽洲介绍,和玉兔号月球车一样,火星车的能源获得依靠太阳能。由于火星光照强度小,火星大气对阳光有削减作用,火星车能源供给比月球车更困难,火星车比“玉兔”多设计出两个“翅膀”。探测器将搭载用于火星全球遥感的相机、探测火星地下浅层结构的雷达等13台科学载荷,对火星的形貌、土壤、环境、大气、水冰分布、物理场和内部结构进行探测。5
“着陆巡视器的着陆点初步定在火星北纬低纬度的区域。”中科院院士、火星探测器系统顾问叶培建说,着陆巡视器与环绕器分离后进入火星大气,经气动外形减速、降落伞减速和反推发动机动力减速,最后下降着陆火星表面,火星车驶离着陆平台,开始表面巡视探测。5环绕器在轨道上进行科学探测,并为火星车提供对地数据中继服务。6
中国首次火星探测任务工程总设计师张荣桥说,火星距离地球最远达4亿公里,2020年中国首次火星探测一次实现“环绕、着陆、巡视”3个目标,这是其他国家第一次实施火星探测从未有过的,面临的挑战也是前所未有。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国