

简介
无线电导航系统是利用了无线电波传播的基本原理:无线电信号在自由空间中用直线方式以光速传播,只要确定了无线电波从发射机到接收机之间的传播时间,便可以确定收发机间的距离为光速与传播时间之积。通常,导航应由导航系统完成,包括装在运载体上的导航设备以及装在其他地方与导航设备配合使用的导航台。凡导航台与移动载体间用无线电方式为媒介来实现导航的,称为无线电导航。1
从导航台的所在位置来判定导航的性质,主要有陆基导航系统和星基导航系统。1
陆基导航系统导航台位于陆地上,导航台与导航设备之间用无线电波联系,如甚高频全向信标(VOR)、微波着陆系统、罗兰、欧米伽导航系统。1
星基导航系统导航台设在人造卫星上,覆盖范围大大扩大,如美国的GPS(全球定位系统)和俄罗斯的GLONASS等卫星导航系统。1
发展历史无线电导航发展历史
20世纪20~30年代无线电测向是航海和航空仅有的一种导航手段而且一直沿用至今,不过它后来已成为一种辅助手段.2
第二次世界大战期间,无线电导航技术迅速发展,出现了各种导航系统,雷达也开始在舰船和飞机上用作导航手段 ,飞机着陆开始使用雷达和仪表着陆系统.2
60年代出现子午仪卫星导航系统.70年代微波,着陆引导系统研制成功.2
80年代,同步测距全球定位系统研制成功.2
基本原理无线电导航主要利用电磁波传播的基本特性:电磁波在在均匀理想媒质中,沿直线(或最短路径)传播;电磁波在自由空间的传播速度是恒定的;电磁波在传播路线上遇到障碍物或在不连续媒质的界面上时会发生反射。3
无线电导航就是利用上述特性,通过无线电波的接收、发射和处理,导航设备能测量出所在载体相对于导航台的方向、距离、距离差、速度等导航参量(几何参量)。通过测量无线电导航台发射信号(无线电电磁波)的时间、相位、幅度、频率参量,可确定运动载体相对于导航台的方位、距离和距离差等几何参量,从而确定运动载体与导航台之间的相对位置关系,据此实现对运动载体的定位和导航。4
优缺点优点:不受时间、天气限制,精度高,作用距离远方,定位时间短,设备简单可靠;2
缺点:必须辐射和接收无线电波而易被发现和干扰,需要载体外的导航台支持,一旦导航台失效,与之对应的导航设备无法使用;同时,易发生故障.2
无线电导航系统分类陆基无线电导航系统第一次世界大战前后,是无线电导航的发明阶段。1912年,航海用无线电罗盘和信标(0.1~1.75MHz)。1929年,航空用四航道信标(0.2~0.4MHz)。航空用无线电罗盘和信标。以测向技术为主,航海应用为主,稍后出现航空应用。4
1943 年 罗兰—A(Loran-A )脉冲信号,脉冲载频为2MHz ,双曲线定位,作用范围约400 n mile
1955 年 罗兰—C (Loran-C )脉冲信号,脉冲载频为100kHz ,双曲线定位,作用范围约1000 n mile ,单次定位精度为460m ,重复定位精度18~90m ,数据更新速率10~20 次。
1958 年 奥米伽(Omega )连续波信号,频率为10~14kHz ,双曲线体制,穿透水下10m 以上,定位精度2~4 n mile ,数据更新速率0.1 次/ 分,8 个导航台,全球覆盖。
1941 年 仪表着陆系统(ILS )精密近进雷达(PAR )
1942 年 台卡(Decca )连续波信号,频率为70~129kHz
1946 年 伏尔(VOR )甚高频全向信标,108~118MHz ,连续波体制,只有方位,精度约为4~5
1949 年 测距器(DME )近程航空导航系统,960~1215MHz ,只有距离,精度约为0.5 n mile
1955 年 塔康(TACAN )战术航空导航系统,960~1215MHz ,脉冲体制,主要为军用(如机场、航空母舰等)
自从无线导航技术在第一次世界大战前后诞生以来,由于军事需要,在第二次世界大战中得到了迅速发展,战后在此基础上得到了进一步的发展和完善,并基本形成了当前的格局。航海用的无线导航系统以双曲线定位体制为主,航空导航以测距— 测向体制为主。某些系统可以同时兼顾航海、航空导航的需要。从50 年代后以来,各种无线导航系统基本完成了全球覆盖。目前虽然GPS 已经广泛应用,但陆基导航系统还在继续使用,并且还在继续发展之中。4
星基无线电导航系统20 世纪50~70 年代,东西方两大阵营的冷战时期,军备竞赛激烈。美国和前苏联为了满足本国以及盟国在军事和航天方面的实际需要。美国和前苏联分别代表的资本主义阵营和社会主义阵营在政治宣传上的需要。
1957 年前苏联成功发射第一颗人造地球卫星。卫星开始用于通信、侦察等领域,推动了天技术发展、电子信息技术的发展、时间基准和传递、大地测绘等基础技术的发展。4
子午仪(Transit) 是美国海军导航卫星系统Navy NavigationSatellite System (NNSS) ,世界上第一个投入使用的全球卫星定位系统。Transit 主要由美国Johns Hopkins Applied Physics Laboratory(JHAPL )设计,经费由the Advanced Research ProjectsAgency (ARPA) 提供。主要目的是为潜艇和水面舰艇提供全球导航定位。1958 年开始研制,1964 年投入使用,1964 年开始民用,1988年发射最后一颗卫星,经过32 年的连续运行后,1996 年底Transit 结束使命。同时揭开了卫星定位时代的序幕。4
20世纪70、80年代美国国防部研制并由美国军方控制的一个全球定位系统,是一个由24 颗人造地球卫星、地面控制系统和用户设备构成的星基无线电定位系统,也就是GPS。GPS 的功能:在全世界任何地方、任何气象条件下为用户提供实时、连续、高精度的三维位置、速度和时间信息(PVT )。GPS 的意义:(1 )解决了无线定位系统覆盖范围和定位精度之间的矛盾。(2 )除了美国及其盟国军用以外,还可供世界各国民用。4
系统工作原理无线电导航所使用的设备或系统有无线电罗盘、伏尔导航系统、塔康导航系统、罗兰C导航系统、奥米加导航系统、多普勒导航系统、卫星导航系统以及发展中的“导航星”全球定位系统等。2
无线电信号中包含4个电气参数:振幅、频率、时间和相位。无线电波在传播过程中,某一参数可能发生与某导航参量有关的变化。通过测量这一电气参数就可得到相应的导航参量。根据所测电气参数的不同,无线电导航系统可分为振幅式、频率式、时间式(脉冲式)和相位式 4种。也可根据要测定的导航参量将无线电导航系统分为测角(方位角或高低角)、测距、测距差和测速 4种。现代还根据无线电导航设备的主要安装基地分为地基(设备主要安装在地面或海面)、空基(设备主要安装在飞行的飞机上)和卫星基(设备主要装在导航卫星上) 3种。根据作用距离分为近程、远程、超远程和全球定位4种。2
无线电导航测角系统利用无线电波直线传播的特性,将飞机上的环形方向性天线转到使接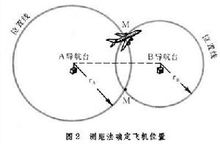 收的信号幅值为最小的位置,从而测出电台航向(见无线电罗盘),这属于振幅式导航系统。同样,也可利用地面导航台发射迅速旋转的方向图,根据飞机不同位置接收到的无线电信号的不同相位来判定地面导航台相对飞机的方位角(见伏尔导航系统),这属于相位式导航系统。测角系统可用于飞机返航(保持某导航参量不变,例如保持电台航向为零,引导飞机飞向导航台)。几何参数(角度、距离等)相等点的轨迹称为位置线。测角系统的位置线是直线(角度参量保持恒值的飞机所在锥面与地平面的交线)。测出两个电台的航向就可得到两条直线位置线的交点,这交点就是飞机的位置(图1)。2
收的信号幅值为最小的位置,从而测出电台航向(见无线电罗盘),这属于振幅式导航系统。同样,也可利用地面导航台发射迅速旋转的方向图,根据飞机不同位置接收到的无线电信号的不同相位来判定地面导航台相对飞机的方位角(见伏尔导航系统),这属于相位式导航系统。测角系统可用于飞机返航(保持某导航参量不变,例如保持电台航向为零,引导飞机飞向导航台)。几何参数(角度、距离等)相等点的轨迹称为位置线。测角系统的位置线是直线(角度参量保持恒值的飞机所在锥面与地平面的交线)。测出两个电台的航向就可得到两条直线位置线的交点,这交点就是飞机的位置(图1)。2
无线电导航测距系统利用无线电波恒速直线传播的特性。在飞机和地面导航台上各安装一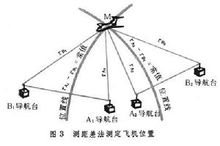 套接收、发射机。飞机向地面导航台发射询问信号,地面导航台接收并向飞机转发回答信号。飞机接收机收到的回答信号比询问信号滞后一定时间。测出滞后时间就可算出飞机与导航台的距离。利用电波的反射特性,测定由地面导航台或飞机的反射信号的滞后时间也可求出距离。无线电导航测距系统的位置线是一个圆周,它由地面导航台等距的圆球位置面与飞机所在高度的地心球面相交而成。利用测距系统可引导飞机在航空港作等待飞行,或由两条圆位置线的交点确定飞机的位置(图2)。定位的双值性(有两个交点)可用第三条圆位置线来消除。测距系统可以是脉冲式的、相位式的或频率式的。2
套接收、发射机。飞机向地面导航台发射询问信号,地面导航台接收并向飞机转发回答信号。飞机接收机收到的回答信号比询问信号滞后一定时间。测出滞后时间就可算出飞机与导航台的距离。利用电波的反射特性,测定由地面导航台或飞机的反射信号的滞后时间也可求出距离。无线电导航测距系统的位置线是一个圆周,它由地面导航台等距的圆球位置面与飞机所在高度的地心球面相交而成。利用测距系统可引导飞机在航空港作等待飞行,或由两条圆位置线的交点确定飞机的位置(图2)。定位的双值性(有两个交点)可用第三条圆位置线来消除。测距系统可以是脉冲式的、相位式的或频率式的。2
无线电导航测距差系统在飞机上安装一台接收机,地面设置2~4个导航台。各导航台同步地(时间同步或相位同步)发射无线电信号,各信号到达飞机接收机的时间滞后与导航台到飞机的距离成比例。测出它们到达的时间差就可求得距离差。与两个定点保持等距离差的点的轨迹是球面双曲面,因此这种系统的位置线是球面双曲面与飞机所在高度的地心球面相交而成的双曲线。利用3或4个地面导航台可求得两条双曲线。根据两条双曲线的交点即可定出飞机的位置(图3)。定位的双值可用第三条双曲线来消除。现代使用的测距差系统大多是脉冲式或相位式的。2
无线电导航测速系统这种系统大多是利用多普勒效应工作的。安装在飞机上的多普勒导航雷达以窄波束向地面发射厘米波段的无线电信号。由于存在多普勒效应,飞机接收到由地面反射回来的信号频率与发射信号频率不同,存在一个多普勒频移,测出多普勒频移就可求出飞行器相对于地面的速度(见多普勒导航系统)。再利用飞机上垂直基准和航向基准给出的俯仰角和航向角,将径向速度分解出东向速度和北向速度,分别对时间求积分即可得出飞机当时的位置。多普勒测速系统的位置线也是双曲线,它是由等多普勒频移的锥面与飞机所在高度的地心球面相交而成的。多普勒导航测速系统属于频率式(见飞机导航系统)。2
我国无线电导航系统我国目前正在使用的主要有两类。一类叫无方向信标,也叫中波导航台,英文缩写为NDB;另一类是甚高频全向信标(缩写为VOR)和测距仪(缩写为DME)组成的系统。5
在中波导航台系统中,飞机使用可以转动的环状天线接收信号,当测到电波最强的方向时,天线停止转动,于是就测出电台与飞机之间的方位。飞机按这个方向飞行,就能准确地飞到电台所在的位置。中波导航台准确性低并且容易受到天气的影响,但它价格便宜,设备结实耐用,所以世界上很多中小型机场和发展中国家的多数机场还在使用它。我国广大的西部地区的机场也在使用这种系统。5
甚高频全向信标台使用甚高频电波,直线传播,不受天气影响,准确度高。VOR的天线在发射时不停地转动, 发射出的信号按方向改变而改变。飞机收到VOR信号时,机上的仪表按照信号的频率和强度变化自动指示出正北方向和飞机相对于发射台的方向。VOR的作用有效范围在200千米以内。通常在航路上每隔150千米左右建立一个VOR台。飞机根据航空地图上标出的VOR台的位置, 就可以在航路上顺利地飞行了。在使用VOR航路飞行时,驾驶员只能知道发射台的方向,但不能确定飞机与发射台之间的距离。当测距仪系统与VOR配套使用后,这个问题就解决了。DME的地面发射台和VOR台建在同一地点或建在机场附近。它所使用的频率是超高频,频率在1000兆赫左右。这套系统由飞机上的询问机和地面台站上的应答机构成。飞机上的询问机向地面发出一对脉冲信号,这脉冲之间的间隔是随机的,使不同飞机发出的信号都是不同的。地面应答机接受到这对脉冲信号后发回同样的一对脉冲信号。把发出信号和收到返回信号所消耗的时间与无线电波传播的速度相乘,就可以算出飞机与地面站之间的距离。测距仪可以测量出的距离最远可达500千米,误差仅为200米左右。在天空中飞行的各架飞机在询问时所发出的脉冲对的间隔不同,在接收时只接收自己所发出的脉冲信号。同时有几架飞机向地面站询问时,它们的信号彼此不会混淆。VOR--DME系统的无线电波在天空中划出一条明确的通道,这条空中通道就叫航路。飞机在航路上飞行,随时可以从仪表上得知自己的航向和位置,根据地面管制员的调度,一个接一个地按航路点飞行,一直飞完全程。VOR--DME导航系统保证了飞机能安全有秩序地飞行,极大地提高了空中的交通流量和飞行安全。现在这个系统成为世界上大部分地区主要的导航手段。5
建设VoR—DME的航路,费用很高。不可能把地面上所有台站之间都建立起航路。一般只能在中心城市之间或中心城市到一般城市之间设立航路。果飞机在两个没有航路的一般城市之间飞行,为了保证飞行安全,这时飞机不得不采取从一个城市沿着已有的航路飞到中心城市,再沿另一条航路飞往所要去的一般城市。这样飞行不但浪费了燃油和时间,又使航路变得拥挤。在飞机上应用了电子计算机以后,才解决了这个问题。从两个以上的VOR地面台站收到的信号经过飞机上的电子计算机处理后得出一条实际上没有地面台站的航线,在这条航线上设置出假想的航路点,飞机按照这条航线飞行,同样也可顺利抵达目的地。这种专门设计的计算机被称为航线计算机。飞机上配备了这种计算机后,就可以在能收到两个以上VOR地面台站所发出的信号的地方,按照计算机计算出来的航线飞行,这种方法叫区域导航。它把VOR的导航范围由几条航路扩展为一个平面,这个平面就是各个VOR导航台站无线电信号所能覆盖的整个平面。5
VOR--DME系统使用的甚高频和超高频电波是直线传播的,作用距离在200千米之内。在浩瀚的大洋或大面积的无人区中,是无法建造出联接一条航路的诸多VOR站的。为了满足远距离导航的需要,又开发出罗兰系统和欧米加系统。这两种系统使用了低频和甚低频的无线电波,作用距离都在2500千米以上。在地球表面只要建立起不多的这类台站,就可以为飞机飞越大洋或辽阔的无人区导航。这种导航的缺点是精确度不够高,而且需要功率非常强大的发射台。20世纪60年代以后,有关专业人士们又开始寻找更好的方式以取代无线电导航系统。5
北斗导航系统北斗卫星导航系统正式进入国际海事组织全球无线电导航系统。6
11月17日至21日,国际海事组织海上安全委员会第94次会议在英国伦敦召开,交通运输部组团参会,并代表中国政府向国际海事组织承诺我国北斗卫星导航系统的服务性能和运行维护管理要求,以及北斗卫星导航系统在国际海事领域的应用政策,表达了我国政府的责任与态度。6
交通运输部有关负责人指出,我国作为国际海事组织A类理事国,此次国际海事组织对北斗卫星导航系统的认可,将带动北斗卫星导航系统在航海领域的国际化、产业化。北斗卫星导航系统也正式成为全球无线电导航系统的组成部分,取得面向海事应用的国际合法地位。这也是我国北斗卫星导航系统标准首次获得国际组织的系统认可。6
此次国际海事组织认可后,我国将继续全面推进国际电工委员会、国际航标组织、国际海事无线电技术委员会、国际电信联盟等国际技术组织的标准、规范、指南文件的制定和修订,以实现北斗系统进一步在国际海事领域的全方位应用。6

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国