

简介
 飞机的水平安定面是飞机尾翼的水平翼面,安定面的作用是使飞机具有适当的静稳定性。当飞机在空中作近似匀速直线运动飞行时,常常会受到各种上升气流或者侧向风的影响,此时飞机的航行姿态就会发生改变,飞机会围绕质心左右(偏航)、上下(俯仰)以及滚转。如果飞机是静不稳定的,就无法自动恢复到原来的飞行姿态,即如果飞机受到风的扰动而抬头,那么飞机就会持续抬头,而且当这股扰动气流消失以后,飞机就会保持抬头姿态,而无法恢复到原来的姿态。
飞机的水平安定面是飞机尾翼的水平翼面,安定面的作用是使飞机具有适当的静稳定性。当飞机在空中作近似匀速直线运动飞行时,常常会受到各种上升气流或者侧向风的影响,此时飞机的航行姿态就会发生改变,飞机会围绕质心左右(偏航)、上下(俯仰)以及滚转。如果飞机是静不稳定的,就无法自动恢复到原来的飞行姿态,即如果飞机受到风的扰动而抬头,那么飞机就会持续抬头,而且当这股扰动气流消失以后,飞机就会保持抬头姿态,而无法恢复到原来的姿态。
作用飞机的水平安定面就能够使飞机在俯仰方向上(即飞机抬头或低头)具有静稳定性。水平安定面是水平尾翼中的固定翼面部分。当飞机水平飞行时,水平安定面不会对飞机产生额外的力矩;而当飞机受到扰动抬头时,此时作用在水平安定面上的气动力就会产生一个使飞机低头的力矩,使飞机恢复到水平飞行姿态;同样,如果飞机低头,则水平安定面产生的力矩就会使飞机抬头,直至恢复水平飞行为止。1
内部结构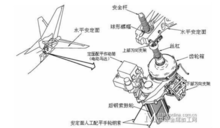 水平安定面制动螺杆是用来使水平安定面运动的能够旋转的螺杆机构,水平安定面位于机身后部由左右2段组成,是辅助升降舵控制飞机俯仰姿态重要部件。水平安定面的移动正常情况由一个电动马达(电动作动筒)驱动。
水平安定面制动螺杆是用来使水平安定面运动的能够旋转的螺杆机构,水平安定面位于机身后部由左右2段组成,是辅助升降舵控制飞机俯仰姿态重要部件。水平安定面的移动正常情况由一个电动马达(电动作动筒)驱动。
配平方式水平安定面对俯仰进行配平,有四种配平方式:主电配平,自动驾驶配平,速度配平,人工配平。2
一、主电配平
电动马达受控于驾驶盘上的安定面配平电门。配平电门是弹簧式电门,由2块组成,正常情况下两个电门同时向下按或同时向上按才能使安定面移动。
二、自动驾驶安定面配平
在自动驾驶接通情况下,FCC(飞行控制计算机)的自动驾驶功能模块控制升降舵改变俯仰姿态在需要用到安定面配合升降舵时或者为保持一个合适姿态时会给安定面发出配平指令让安定面移动。这和我们人工操纵飞机用主电配平让安定面辅助升降舵的原理是一样的。
三、速度配平
速度配平是FCC(飞行控制计算机)的一个功能模块,一般情况下,俯仰姿态大,空速就小,俯仰姿态小,空速就大。根据手册给出的定义来理解,如果出现俯仰姿态大的情况下,那么空速就会小,飞机就不会太稳定,FCC(飞行控制计算机)监控安定面位置、推力手柄位置、空速和垂直速度的输入信号,就会启动速度配平:让安定面自动向减小俯仰姿态的方向移动,从而增加飞机空速,让飞机处于一个合理的稳定状态。一旦飞机返回到配平速度,速度配平系统指令安定面的移动就解除了。也就是说速度配平是FCC(飞行控制计算机)对飞机状态的监控与自我保护。
四、人工配平
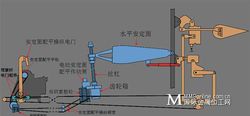
人工通过转动手轮移动前后钢索鼓轮,后钢索鼓轮移动齿轮箱和丝杠。当丝杠移动时,水平安定面移动。
人工配平超控任何其他配平,人工配平的范围-0.20 至16.9 单位,安定面前缘向上最大移动4.2 度,向下最大移动12.9 度,中立位置是0度或者是4个配平单位。
失控的模拟训练“安定面失控”是波音737飞机操纵系统的重要故障,在非正常检查单项目中用明显的黑体字标出,在每年的模拟机训练中都有这一科目,可见其重要性不一般。
一、安定面基础知识
1. 水平安定面的面积一般是升降舵面积的3倍左右,安定面偏转1°相当于升降舵偏转3°左右,可见其作用力之大。所以对起飞很重要的一条就是要将水平安定面调整到和重心位置相适应的位置。
2. 升降舵是操纵系统,水平安定面是配平系统。使用水平安定面配平时只能一点一点地以短促移动的方式加以改变,特别是在很大的速度下,每移动一点都要等待其效果充分表现出来以后,才能做下一步移动。
3. 安定面操纵的优先顺序:
人工操纵——用安定面配平手轮人工操纵水平安定面,人工配平手轮的转动带动安定面指示器指针指示;
电动操纵——用安定面配平电门进行电动操纵,带动人工配平手轮和安定面指示器指针;
自动驾驶操纵——自动驾驶仪通过数字式飞行控制系统(DFCS)自动操纵安定面。
4. 安定面配平作动筒是一个多转速直流马达,从安定面配平操纵电门或自动驾驶接收操纵指令。
二、安定面配平的供电
1. 主电动配平:由115伏交流转换汇流条2给安定面配平电动作动筒提供三相交流电。
2. 自动驾驶:由115伏交流转换汇流条1给安定面配平电动作动筒提供三相交流电。
三、安定面配平切断电门
如果出现安定面失控,必须尽快制止。驾驶员使用操纵台上主电动或自动驾驶安定面配平切断电门,中断电动马达的电源,制止“安定面失控”。
四、主电动配平失控
1. 在自动驾驶没有接通时,由于主电动配平的电气系统故障,导致配平马达失控,水平安定面沿最先使用配平方向持续旋转;
2. 关断操纵台上主电动配平切断电门“MAIN ELECT”;
3. 人工配平和自动配平系统仍可使用,先使用人工配平手轮将飞机配平到合适位置,然后接通自动驾驶;
4. 当P-6断路器面板上“STAB TRIM ACTUATOR” 电动配平作动筒断路器跳开,主电动配平不能使用,人工和自动驾驶配平可以使用;
5. 当P-6断路器面板上“STAB TRIM CONT”配平控制断路器跳开,主电动配平不能使用,人工和自动驾驶配平可以使用;
6. 当115伏交流转换汇流条2故障时,主电动配平不能使用。
五、自动驾驶配平失控
1. 在自动驾驶接通时出现与当前飞行条件不符合的安定面配平轮持续旋转,驾驶员应完成非正常检查单的“安定面失控”处置的记忆项目;
2. 断开自动驾驶,不要再次接通自动驾驶;
3. 使用驾驶杆人工控制飞机俯仰姿态,并按需使用主电动配平;
4. 如果继续失控,关断主电动配平和自动驾驶配平的切断电门;
5. 如果继续失控,用力握紧并保持安定面配平手轮;
6. 当P-18断路器面板上“STABILIZER TRIM” 安定面自动驾驶配平断路器跳开时,是由于自动配平系统电流过大,虽然此时自动驾驶不会断开(单通道或双通道),安定面自动配平不工作,但是人工和主电动配平仍可以使用。断开自动驾驶,使用主电动配平或人工配平;
7. 115伏交流转换汇流条1故障时,自动驾驶配平不能使用。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国