

优势
通过反过来计算可以最好地理解其优势,飞船中唯一需要推离月球轨道并返回地球的部分就是加隔热层保护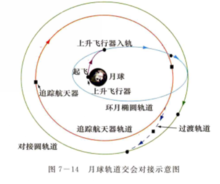 的指令舱,这就决定了完成此任务勤务舱所需要的推进剂量。另外,通过为任务特别设计的登月舱,将阿波罗母船(即指令勤务舱)及其为返回地球家园所需的消耗品和推进剂留在月球轨道上,从而不用携带大量多余的质量降落到月球表面并再次升空。登月舱仅需带两名宇航员到月面,留下第三名宇航员照看指令勤务舱。此外,不需要将带他们降落月面的发动机、着月装置以及空储箱再次带回月球轨道。宇航员只需要利用登月舱的上面部分就能返回母船,可使用更小的发动机和更少的推进剂来完成此任务。由于没有必要将登月舱的其余部分带回地球,可丢在月球上,因此指令勤务舱携带的最终推进剂总量就是整个组合体返回月球轨道所需的部分加上进入地球的部分。在飞行的每一个阶段,只需加速最小的质量,而其他任何已经完成使命的东西都将随时丢弃。
的指令舱,这就决定了完成此任务勤务舱所需要的推进剂量。另外,通过为任务特别设计的登月舱,将阿波罗母船(即指令勤务舱)及其为返回地球家园所需的消耗品和推进剂留在月球轨道上,从而不用携带大量多余的质量降落到月球表面并再次升空。登月舱仅需带两名宇航员到月面,留下第三名宇航员照看指令勤务舱。此外,不需要将带他们降落月面的发动机、着月装置以及空储箱再次带回月球轨道。宇航员只需要利用登月舱的上面部分就能返回母船,可使用更小的发动机和更少的推进剂来完成此任务。由于没有必要将登月舱的其余部分带回地球,可丢在月球上,因此指令勤务舱携带的最终推进剂总量就是整个组合体返回月球轨道所需的部分加上进入地球的部分。在飞行的每一个阶段,只需加速最小的质量,而其他任何已经完成使命的东西都将随时丢弃。
节省的累计质量很大,使得月球轨道交会方案在工程和成本方面十分具有吸引力,但这一方案使NASA必须面对一些在太空飞行早期似乎无法实现的工程可行性问题。同地球轨道交会方案一样,有两个独立的航天器,就意味着要学会如何在它们以惊人的速度飞行时让它们在轨道上交会对接。两艘飞船必须连接或对接在一起,才能使宇航员和货物从一个航天器转移到另一个航天器内。这些技术都还没有在地球轨道上演示过,而且月球轨道交会方案要求这一切在近500 000千米远的月球附近独立进行。月球轨道上交会失败必定导致登月舱上宇航员死在月球轨道上。而对接失败将要求宇航员必须穿上航天服并经外太空从一个航天器转移到另一个航天器。在没有人知道失重环境会使身穿笨重压力服的宇航员面对何种挑战的情况下,完成上述工作似乎是极度冒险的。1
发展历史肯尼迪总统宣布在10年内完成登月的挑战后,NASA用了一年多的时间讨论登月模式问题。在那段时间里,直接上升式及其庞大的新星火箭方案在很大程度上被否决了,留下冯·布劳恩力争的地球轨道交会方案和吉尔鲁斯推崇的月球轨道交会方案作为竞选方案。但直到最后决定之前,仍无法认真展开飞船研究。NASA总部的约瑟夫·舍尔要求双方就对方的方案提交报告,这是一种管理策略,让冯·布劳恩认真审视月球轨道交会方案的优点。1962年6月,在马歇尔航天中心召开的一次大型会议上,NASA采纳了霍博特的提议,选择月球轨道交会方案作为他们奔月的途径。
飞行模式确定后,就开始宇宙飞船的设计和建造。指令勤务舱由北美航空公司建造。对这些飞船已很好地展开了早期研制,只是它们的功能现在才能准确设计,例如勤务舱上不需要登月级。勤务舱的主要组件已经完成了设计。决定保留推进系统推力的最初设计指标,并在飞行任务规划中统一考虑它。研制了两种型号的指令勤务舱。第一种不能支持前往月球的任务,但它可在地球轨道上进行工艺试验并获取经验,直到第二种飞船成熟。第二种飞船将是真正意义上的月球飞船,配上供电的燃料电池、用于对接的硬件、深空通信以及完善的制导导航系统,第二种指令勤务舱就成为阿波罗故事中的主角,它将运送一个类似蜘蛛的登月器前往另一个世界。在某种意义上,指令勤务舱是一个微型行星,为3名宇航员在宇宙中生活长达两星期提供全部必需品,同时又让他们完成人类多年来梦想的旅程。最后,第二种飞船的设计方案吸取了第一种方案无法完成载人飞行任务的一些致命缺陷的教训。1
特点目前,仅有阿波罗号飞船实现了月球轨道交会对接,而且在最后几百米的交会对接控制均是由航天员手动完成的,因此,月球轨道交会对接还没有实现真正意义上的自动交会对接。同低地球轨道交会对接相比,月球轨道交会对接具有如下特点。
地面测控条件月球离地球最近的距离约36万千米,最远距离约40万千米,而地球同步卫星轨道高度仅为357 86 km,相比之下,由于月球探测器和地面测控站之间的距离比地球同步卫星和地面测控站之间的距离远得多,因此对月球探测器的测控精度比对地球轨道航天器的测控精度差。值得说明的是,在近距离导引段之后,不再依赖于地面测控,而是由探测器进行自主轨道确定。
月球探测器测控的有利条件在于单个测控弧段长,对200 km左右轨道高度的月球探测器的测控时间可达1小时,这意味着月球轨道交会对接中最后平移靠拢段的飞行过程可以在地面站的测控监视下进行。
自主测量手段从航天器自主测量手段来看,月球轨道交会对接的追踪航天器和目标航天器无法利用全球定位系统GPS或GLONASS的高精度绝对定位和相对定位。一方面,追踪航天器无法利用GPS或GLONASS的测量信息进行绝对轨道确定,只能依靠轨道外推或利用相对测量信息进行轨道确定,轨道确定精度较差,增加了月球轨道交会对接的难度;另一方面,因为缺少高精度的GPS或GLONASS的相对定位测量,月球轨道交会对接的相对测量依赖于测量精度比GPS稍差的微波雷达和激光雷达,这也对制导和控制系统提出了更高的要求。2
交会对接的轨道高度月球轨道交会对接时的轨道一般低于低地球轨道交会对接时的轨道。其原因主要有以下两点。
1)进行月球轨道交会对接的两个航天器,有一个是从月面起飞,较低的对接轨道有利于节省起飞过程中所需的推进剂。如阿波罗号的上升飞行器从月面发射并进入近月点17 km、远月点83 km的椭圆轨道,然后进行轨道圆化并抬高至110 km的圆轨道,与指挥服务舱进行对接。
2)月球轨道上不存在大气,且月球引力常数约为地球引力常数的1/6,这允许从月面起飞的航天器在较低的轨道上稳定运行。而低地球轨道交会对接,一般是由运载火箭将航天器发射至大气层外的某一轨道高度上,再通过地面导引慢慢消除两个航天器之间的相位差后进行对接,对接时的轨道高度一般在300 km以上。2
对接机构对接机构是交会对接过程中用于连接追踪航天器和目标航天器的重要设备。目前常用的对接机构分为两大类,即撞击式对接机构和弱撞击式对接机构。
撞击式对接机构应用于对接初始条件偏差范围较大的情况,其结构相对复杂,质量较大,可达上百千克。这种对接机构目前多用于载人航天器的交会对接中,需要同时满足密封、可形成过渡通道和高可靠性要求,并且对结构连接刚度要求较高。
弱撞击式对接机构适用于对接初始条件精度较高的情况,初始接触速度很小,质量较小,可达十几千克,而且结构简单,多用于小型无人航天器的交会对接中。
无人月球轨道交会对接任务适宜采用弱撞击式对接机构,该对接机构质量较小,对从月面起飞的航天器的质量影响较小,可以节省起飞过程中所需的推进剂,但这类对接机构对交会对接制导、导航和控制精度要求更高。2
具体方案上升飞行器携带样品从月面起飞,入轨时的轨道是近月点为15 km的环月椭圆轨道,经过地面的测控和变轨,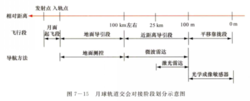 进入高于追踪航天器的环月对接圆轨道。然后追踪航天器接近上升飞行器,到达上升飞行器后下方100 km左右时,相对测量敏感器开始工作并建立稳定的相对导航,追踪航天器转入自主交会的制导和控制,不依赖地面测控完成月球轨道交会对接。
进入高于追踪航天器的环月对接圆轨道。然后追踪航天器接近上升飞行器,到达上升飞行器后下方100 km左右时,相对测量敏感器开始工作并建立稳定的相对导航,追踪航天器转入自主交会的制导和控制,不依赖地面测控完成月球轨道交会对接。
月球轨道交会对接的整个过程又可分为月面起飞段、地面导引段、近距离导引段和平移靠拢段,各阶段划分如右图所示。自主交会阶段包括近距离导引段和平移靠拢段,近距离导引段从相对距离100 km左右开始至100 m结束.平移靠拢段从相对距离100 m开始直至完成对接。
从相对测量敏感器的使用上来讲,两航天器相距25 km以上时采用微波雷达的测量信息进行自主相对导航,25 km以内时采用微波雷达为主、激光雷达为辅的方式进行自主相对导航;平移靠拢段则主要依靠光学成像敏感器进行自主相对导航。地面导引段通过地面测控由上升飞行器完成,不涉及自主导航。2


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国