

地理名词知识要点
1、地理空间定位的基础知识
2、地理空间定位的基本要求
3、地理空间定位的基该方法
目标要求1、地理空间定位的基础知识——掌握
2、地理空间定位的基本要求——知道
3、地理空间定位的基该方法——运用
学习方法根据地图,读图分析
命题呈现⒈ 依据地理事物的地理坐标定位
⒉ 通过地理事物的相对位置定位
⒊ 根据地理事物的典型特征定位:如面积,轮廓和形状,气候,地形,植被,工业,交通,人口,城市等.
⒋ 用图例,注记,比例尺等图中信息辅助定位
⒌ 用题目中的文字提示信息辅助定位
主要方法1、经纬网定位法(绝对定位法)
地球上任何一个地区的区域位置都可以通过一组具体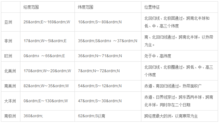 的经度和纬度来确定。利用经纬网进行定位是区域定位中最常见、最准确的方法,也是近几年高考的重点。这种定位方法要求在区域地理的学习中,不仅要脑中有图,而且要胸中有网(经纬网),要用经纬网覆盖脑中的地图,特别要注意掌握地球上一些重要的经线。
的经度和纬度来确定。利用经纬网进行定位是区域定位中最常见、最准确的方法,也是近几年高考的重点。这种定位方法要求在区域地理的学习中,不仅要脑中有图,而且要胸中有网(经纬网),要用经纬网覆盖脑中的地图,特别要注意掌握地球上一些重要的经线。
2、主要经纬线及附近的地理事物
0º;经线:穿过欧洲和非洲西部。附近的地理事物有伦敦、巴黎(Oº;经线东侧)、地中海、撒哈拉沙漠、几内亚湾等。东经30º;:穿过欧洲中部、非洲东部。主要的地理事物有摩尔曼斯克(30ºE东侧)、莫斯科(30ºE东侧)、东欧平原和波德平原交界处、黑海、小亚细亚半岛(西侧)、地中海、开罗、尼罗河、东非高原(西侧)、南非高原(东侧)等。通过这些重要的经纬线建立基本经纬网,通过各大洲及重要国家的大致经纬度范围以及这些国家的位置关系来进行空间定位。
东经60º;:穿过亚洲西部。主要的地理事物有乌拉尔山脉、咸海、伊朗高原、阿拉伯半岛(东侧)、阿拉伯海等。东经90º;:穿过亚洲中部。主要的地理事物有叶尼塞河(西西伯利亚平原与中西伯利亚高原界河)、阿尔泰山、准噶尔盆地、天山、塔里木盆地、青藏高原、拉萨(东经90º;东侧)、恒河三角洲、孟加拉湾等。 东经120º;:穿过亚洲东部和澳大利亚西侧。主要的地理事物有勒拿河(东侧)、大兴安岭(东侧)、北京(西侧)、上海(东侧)、菲律宾群岛、马来群岛,澳大利亚西部。东经150º;:穿过亚洲、澳大利亚东部。主要的地理事物有东西伯利亚山地、千岛群岛、大分水岭、悉尼(东侧)、堪培拉(西侧)等。180º;:穿过太平洋中部。主要的地理事物有白令海、阿留申群岛、图瓦卢群岛、斐济群岛,新西兰等。西经30º;:穿过大西洋中部。西经60º;:穿过北美洲东部、南美洲中部。主要的地理事物有纽芬兰岛(西部)、加勒比海(东部)、圭亚那高原、亚马孙平原、巴西高原、拉普拉塔平原、南极半岛。西经90º;:穿过北美洲中部。主要的地理事物有密西西比河、墨西哥湾、中美洲。西经120º;:穿过北美洲西部。主要的地理事物有落基山。西经150º;:穿过美国的阿拉斯加州中部、夏威夷群岛东部。
3、海陆位置定位法(相对定位法)
在区域地理复习中,我们不可能也没有必要记住所有事物的经纬度。在记住主要经纬线附近地理事物的同时,我们还可以通过识记一些重要的地理事物(如大洲、大洋),然后以其为参照系,利用地理事物的相对位置进行区域定位,因此海陆位置定位法也称为相对定位法。地球上有七大洲和四大洋,每个区域周围的海陆分布是固定的,可以利用这种海陆位置的固定性进行区域定位。利用海陆位置定位,必须在复习时记住地球表面的海陆分布状况。如亚洲北临北冰洋,东临太平洋,南临印度洋,与大西洋不直接相邻。北美洲北临北冰洋,东临大西洋,西临太平洋等。太平洋被亚洲、大洋洲、南极洲、南美洲和北美洲包围,大西洋被欧洲、非洲、南极洲、南美洲和北美洲包围;印度洋被亚洲、大洋洲、南极洲和非洲包围;北冰洋被亚洲、欧洲、北美洲包围等。除了七大洲和四大洋外,世界一些重要的海、海湾、海峡也是进行海陆位置定位的重要参照系。 主要纬线及附近的地理事物 赤道:穿过非洲中部、东南亚、南美洲北部。主要的地理事物有刚果盆地、东非高原、马来群岛、亚马孙平原等。 北回归线:穿过北非、阿拉伯半岛、印度半岛、中南半岛、中国华南地区、台湾岛、夏威夷群岛、墨西哥高原、墨西哥湾。 北极圈:穿过欧洲、俄罗斯北部。 南回归线:穿过非洲南部、澳大利亚中部、南美洲中部。主要的地理事物有南非高原、澳大利亚大沙漠、大自流盆地、大分水岭、安第斯山中部、拉普拉塔平原北部。 南极圈:南极大陆外围。 以上12条等距的经线、5条特殊的纬线,基本上可以构成覆盖地球表面的经纬网络,也基本上可以满足对地理事物的粗略定位。
4、区域轮廓定位法
世界上每一个区域,大到一个大洲、大洋,小到一个湖泊、一条河流,都有一定的轮廓特征。我们既可以根据面状地理事物的轮廓形状特征,也可以根据线状地理事物的分布特征(如山脉、河流、交通线、行政区划界线、海岸线等分布状况)和点状地理事物的相关位置(如城市、矿产、山峰等)分析定位。根据轮廓形状判断区域时首先要识别各种行政轮廓,侧重识别中国34个省级行政区轮廓和世界主要国家轮廓其次要识别海陆轮廓,主要指大洲、大洋的轮廓,对一些著名的湖泊(如五大湖、贝加尔湖、里海、咸海、鄱阳湖、洞庭湖、太湖、青海湖等)也要关注。
5、地理景观定位法
由于地理环境差异和人类活动的影响,不同地区在自然地理景观和人文地理景观上存在较大的差异,通过这些地理景观也可以正确地确定所在地区的位置。⑴自然地理景观定位法。不同区域有不同的地貌景观,由于纬度位置和海陆位置的差异,它们的气候、植被和动物不同,形成了不同的自然地理景观,成为确定区域位置的重要依据。如日本的富土山,非洲热带草原上的长颈鹿、斑马,热带地区的椰子树、天然橡胶,南极洲的企鹅,干旱地区的仙人掌,沙漠地区的绿洲等。
6、文字资料定位法
利用相关文字资料考查空间定位是近年来出现的一种命题思路,这需要读懂文字内容,运用所学知识进行空间定位。
7、图例、注记定位法
有些试题文字部分没有明确指出该地的具体名称,这时要充分利用图中的图例(首都、省会与一般城市图例的不同,海岸线与国界线的不同等)、注记(城市、河流湖泊等的名称)来进行定位。
8、综合定位法
从近几年的高考试题来看,由于目前试卷提供的区域地图往往是小区域的大比例尺地图,与学生平时接触到的小比例尺地图有所不同。解题时采用某一种区域定位方法准确地确定图示区域的范围显得有点困难。这时就要求学生同时利用多种定位方法进行区域定位。这样既能提高区域定位的速度,又能提高区域定位的正确性。
方法规律空间定位前提是建立牢固的空间概念,做到“心中有图”。所以,平时复习要将各种地理事物在脑海中牢固、准确的“定位”,逐步在大脑中形成“经纬网”。步骤如下:1、会判断东、西经和东、西半球:经度自西向东逐渐增大的为东经。经度自东向西逐渐增大的为西经。位于20ºW以东,160ºE以西的为东半球,位于160ºE以东.20ºW以西的为西半球。2、会判断南、北纬和南、北半球:纬度自南向北逐渐增大的为北纬,纬度自北向南逐渐增大的为南纬。经纬网地图中确定南北半球的常见方法有:①据纬度:北纬在北半球,南纬在南半球;②据极地俯视图中心字母:为N的在北半球,为S的在南半球;③据极地俯视图中地球自转方向:逆时针为北极上空俯视,为北半球,顺时针为南极上空俯视,为南半球;④据经度数值的变化:首先据东(西)经度数增大的方向,确定地球自转的方向,然后确定南北半球;⑤据光照图特定日期极昼、极夜的状况:夏至日极圈以内极昼的北半球、极圈以内极夜的为南半球,冬至日相反;⑥利用极地周围的风向:风向由中心向四周顺时针方向辐散的为北半球,风向由中心向四周逆时针方向辐散的为南半球;⑦据极地附近的海陆分布:极地中心附近为海洋,四周被大陆包围的为北半球,极地中心附近为大陆,四周被海洋包围的为南半球。3、掌握经纬线的特点:⑴高纬度的经纬线彼此垂直,极地投影图纬线圈呈闭合圆形,经线圈以极点为中心呈放射状直线;⑵中纬度的经纬线彼此垂直,纬线圈呈弧形,经线圈呈放射状直线;⑶低纬度经、纬线皆为彼此垂直的直线。
技术名词简介 GPS作为一种全新的现代空间定位方法,已逐渐在越来越多的领域取代了常规光学和电子仪器。80年代以来,尤其是90年代以来,GPS卫星定位和导航技术与现代通信技术相结合,在空间定位技术方面引起了革命性的变化。用GPS同时测定3维坐标的方法将测绘定位技术从陆地和近海扩展到整个海洋和外层空间,从静态扩展到动态,从单点定位扩展到局部与广域差分,从事后处理扩展到实时(准实时)定位与导航,绝对和相对精度扩展到米级、厘米级乃至亚毫米级,从而大大拓宽它的应用范围和在各行各业中的作用。不久的将来,人人可以戴上GPS手表,加上移动电话,你的活动就可以自动进入数字地球中去。
GPS作为一种全新的现代空间定位方法,已逐渐在越来越多的领域取代了常规光学和电子仪器。80年代以来,尤其是90年代以来,GPS卫星定位和导航技术与现代通信技术相结合,在空间定位技术方面引起了革命性的变化。用GPS同时测定3维坐标的方法将测绘定位技术从陆地和近海扩展到整个海洋和外层空间,从静态扩展到动态,从单点定位扩展到局部与广域差分,从事后处理扩展到实时(准实时)定位与导航,绝对和相对精度扩展到米级、厘米级乃至亚毫米级,从而大大拓宽它的应用范围和在各行各业中的作用。不久的将来,人人可以戴上GPS手表,加上移动电话,你的活动就可以自动进入数字地球中去。
GPS 定位的基本信息包含有人为或非人为(大气层、设备热噪声等)随机干扰的伪距测量值和广播星历,定位计算的过程就是从这些信息中提取接收机的位置和速度的过程,即状态估计。1
 GPS全球卫星定位导航系统(GlobalPositioningSystem-GPS)是美国从20世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。中国测绘等部门的使用表明,GPS以全天候、高精度、自动化、高效益等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科,从而给测绘领域带来一场深刻的技术革命。随着全球定位系统的不断改进,硬、软件的不断完善,GPS 技术不断的成熟和迅猛发展, 现在已渗透入除专业领域外的民用领域, 从最初的航天及军事应用,应用领域正在不断地开拓,已遍及国民经济各种部门,并开始逐步深入人们的日常生活。私人汽车保有量的不断增长, 车载 GPS 导航已进入普及阶段。GPS 全球卫星定位导航系统从日常的出行到老人儿童甚至宠物的协寻, 应用范围不断扩大。2
GPS全球卫星定位导航系统(GlobalPositioningSystem-GPS)是美国从20世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。中国测绘等部门的使用表明,GPS以全天候、高精度、自动化、高效益等显著特点,赢得广大测绘工作者的信赖,并成功地应用于大地测量、工程测量、航空摄影测量、运载工具导航和管制、地壳运动监测、工程变形监测、资源勘察、地球动力学等多种学科,从而给测绘领域带来一场深刻的技术革命。随着全球定位系统的不断改进,硬、软件的不断完善,GPS 技术不断的成熟和迅猛发展, 现在已渗透入除专业领域外的民用领域, 从最初的航天及军事应用,应用领域正在不断地开拓,已遍及国民经济各种部门,并开始逐步深入人们的日常生活。私人汽车保有量的不断增长, 车载 GPS 导航已进入普及阶段。GPS 全球卫星定位导航系统从日常的出行到老人儿童甚至宠物的协寻, 应用范围不断扩大。2
特点 1、全球,全天候工作:
1、全球,全天候工作:
能为用户提供连续,实时的三维位置,三维速度和精密时间。不受天气的影响。
2、定位精度高:
单机定位精度优于10米,采用差分定位,精度可达厘米级和毫米级。
3、功能多,应用广:
随着人们对GPS认识的加深,GPS不仅在测量,导航,测速,测时等方面得到更广泛的应用,而且其应用领域不断扩大。
发展历程 在卫星定位系统出现之前,远程导航与定位主要用无线导航系统。
在卫星定位系统出现之前,远程导航与定位主要用无线导航系统。
1、无线电导航系统
·罗兰--C:工作在100KHZ,由三个地面导航台组成,导航工作区域2000KM,一般精度200-300M。
·Omega(奥米茄):工作在十几千赫。由八个地面导航台组成,可覆盖全球。精度几英里。
·多卜勒系统:利用多卜勒频移原理,通过测量其频移得到运动物参数(地速和偏流角),推算出飞行器位置,属自备式航位推算系统。误差随航程增加而累加。
缺点:覆盖的工作区域小;电波传播受大气影响;定位精度不高。2、卫星定位系统
最早的卫星定位系统是美国的子午仪系统(transit),1958年研制,64年正式投入使用。由于该系统卫星数目较小(5-6颗),运行高度较低(平均1000KM),从地面站观测到卫星的时间隔较长(平均1.5h),因而它无法提供连续的实时三维导航,而且精度较低。
为满足军事部门和民用部门对连续实时和三维导航的迫切要求。1973年美国国防部制定了GPS计划。
3、GPS
GPS实施计划共分三个阶段:
·第一阶段为方案论证和初步设计阶段。从1973年到1979年,共发射了4颗试验卫星。研制了地面接收机及建立地面跟踪网。
·第二阶段为全面研制和试验阶段。从1979年到1984年,又陆续发射了7颗试验卫星,研制了各种用途接收机。实验表明,GPS定位精度远远超过设计标准。
·第三阶段为实用组网阶段。1989年2月4日第一颗GPS工作卫星发射成功,表明GPS系统进入工程建设阶段。1993年底实用的GPS网即(21+3)GPS星座已经建成,今后将根据计划更换失效的卫星。
组成 GPS由三个独立的部分组成:
GPS由三个独立的部分组成:
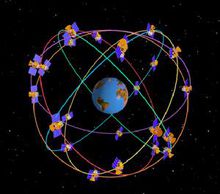
●空间部分:21颗工作卫星,3颗备用卫星。
●地面支撑系统:1个主控站,3个注入站,5个监测站。
●用户设备部分:接收GPS卫星发射信号,以获得必要的导航和定位信息,经数据处理,完成导航和定位工作。
GPS接收机硬件一般由主机、天线和电源组成。
原理GPS定位原理
GPS定位的基本原理是根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法,确定待测点的位置。
DGPS原理
GPS系统提供的定位精度是优于10米,而为得到更高的定位精度,通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。差分GPS分为两大类:伪距差分和载波相位差分。
1.伪距差分原理
这是应用最广的一种差分。在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。
这种差分,能得到米级定位精度,如沿海广泛使用的“信标差分”
2.载波相位差分原理
载波相位差分技术又称RTK(RealTimeKinematic)技术,是实时处理两个测站载波相位观测量的差分方法。即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。载波相位差分可使定位精度达到厘米级。大量应用于动态需要高精度位置的领域。
其他应用近年来英国 Strathclyde 大学的 Philip Moore 等人提出了特高频阵列空间定位的思路,通过四个特高频传感器组成传感阵列,实现整个变电站内放电源的检测及空间定位。这样的系统的结构简单,充分利用了特高频技术灵敏度高、覆盖范围广的优势。相比目前的在线监测和带电检测设备,在满足状态检修工作要求的同时,在经济性方面具有明显的优势。3
成功实现放电源空间定位的关键是特高频传感器,相比常规的特高频传感器,用于空间定位的传感器需要有宽频带、低损耗、全向、群时延稳定性好、灵敏度高等特点。采用倒锥型和盘锥型传感器对局放进行空间定位,取得较好的效果,但两种传感器均较重且体积较大,不便于携带与安装。新研制的一种轻便小巧的专用于空间定位的特高频传感器,该传感器主体采用球面、锥形相结合的结构,通过特定的短接柱进行性能调整,仿真及实测结果均显示该传感器,性能优异,能满足变电站空间定位的要求。
声音传感器阵列是指由一定的几何结构排列而成的若干个声音传感器组成的阵列, 它具有很强的空间选择性,且不需要移动声音传感器即可获取声源信号,同时还可在一定范围内实现声源的自适应检测、定位及跟踪,这使得它被广泛应用于诸多领域。4
目标定位通常用 3 种类型的物理量进行计算:接收信号的强度(RSS)、到达时延/时延差(TOA/TDOA) 和到达方向/到达角(DOA/AOA)。 在传统的简单波束形成器中 ,权值取决于各阵元上信号的相位延迟。 后来出现的一些更复杂的波束形成系统对信号进行了滤波, 根据不同的滤波器形成了不同的算法。采用TOA/TDOA 方法和基于空间坐标系的定位算法,利用 MSP430F149 实现系统控制,实现方法简单,测试结果表明定位精度较高。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国