

背景
中国民航业高速发展,空中交通愈加繁荣,随着大型枢纽机场的飞机起降架次迅速增长,空中交通管理和机场管理面临着越来越大的压力。然而,以飞行计划为中心的空管自动化系统对飞行剖面推算能力较差,不能为航空器配备精确的空管间隔,因此容易造成空中交通拥挤。为此,美国和欧洲分别计划实施采用4D航迹运行的新一代空中管理系统更好地实现空中交通安全和效率。4D航迹是以航空器的经度、纬度、高度与时间坐标对航空器全部飞行路径的关键点和时间加以精确描述的轨迹。中国也于2007年开始规划发展民航新一代空中交通管理系统,据预计2025年完成,届时将实现飞行任务的4D航迹管理,从而提高空中交通效率并减少排放和污染。
由于飞行剖面识别是航空器四维(Foul-dimensional,4D)航迹预测研究的热点问题,提出一种基于航空器气象资料下传(Aircraft meteorological data relay, AMDAR)数据的全飞行过程剖面生成方法,包括由高度航程构成的标称高度剖面和空速淘亢程构成的标称速度剖面。邢健等首次将动态空间规整算法(Dynamic space warping,DSW)应用到飞行高度剖面的相似距离计算中,计算出标称飞行高度剖面;为解决在地速未知情况下标称速度剖面的计算问题,结合大椭圆距离算法与航空器基本性能数据库(Base of aircraft data, RADA),给出一种标称飞行速度剖面的计算方法,该方法保留了AMDAR实测历史数据中所隐含的飞行意图与气象因素。实际算例表明,邢健等提出的方法能够有效地得到真实反映航空器飞行状态的全飞行剖面。
简介飞行速度剖面是指航空器在飞行过程中飞行速度与航程的二维图像轨迹,不考虑航空器在各个航路点的转弯动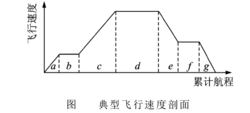 作,仅考虑在不同航路点之间速度的变化,且假设转弯过程为匀速飞行,因此整个飞行阶段可以等效为不同航路点之间速度变化的直线飞行。飞行速度剖面反映了空速大小随航程的变化情况。典型的飞行速度剖面也是由一系列剖面段连接而成,如图所示:a阶段为起飞加速阶段;b阶段为等校正空速爬升阶段;c阶段为加速到巡航速度阶段;d阶段为等表速或等马赫数巡航阶段;e阶段为减速阶段;f阶段为等校正空速下降阶段;g阶段为减速着陆阶段。1
作,仅考虑在不同航路点之间速度的变化,且假设转弯过程为匀速飞行,因此整个飞行阶段可以等效为不同航路点之间速度变化的直线飞行。飞行速度剖面反映了空速大小随航程的变化情况。典型的飞行速度剖面也是由一系列剖面段连接而成,如图所示:a阶段为起飞加速阶段;b阶段为等校正空速爬升阶段;c阶段为加速到巡航速度阶段;d阶段为等表速或等马赫数巡航阶段;e阶段为减速阶段;f阶段为等校正空速下降阶段;g阶段为减速着陆阶段。1
基于速度剖面拟合的4D轨迹顶测我国经济的高速发展,使得航空运输业处于高速发展中。随着机场交通流量的增长、布局的日益复杂化,滑行路径不能合理规划,机场资源不能充分利用,机场场面运动主要依靠人工安排滑行路径并目视引导的方式越来越不能满足机场场面管理的要求。在低能见度的情况下,机场运行将更加困难。精确合理的4D轨迹预测可以计划航空器到达交叉口的预计到达时间及预计离开时间,有效减少高密度机场的阻塞与冲突,减少航空器的等待时间以及在滑行道上的滑行时间,从而大大提高机场的整体运行效率和综合保障能力。
目前对轨迹预测常用的方法可以分为两种:一种是基于空气动力学或牛顿力学的预测模型,如顾宏斌建立6自由度的飞机地面运动数学模型,不引入任何人为的运动学假设,通过给定操纵信号,求出前轮和飞机的运动及其相互作用。Wu Di等提出比较了场面轨迹规划和预测的不同数学模型,并研究了目标在场面运行过程中的各组成部分,提出航空器动力学模型、动作意图的数学表达式,讨论了飞行员操作系统等影响场面轨迹的因素。但在实际运行过程中航空器的诸多动力学参数并不易获得,因此,建立的目标动力学模型并不精确,同时,动力学模型中未体现航空器在地面滑行过程中受到的地面管制以及驾驶员操作意图的影响。另一种是基于卡尔曼滤波等的无参数估计方法,如Wang W基于当前统计模型的自适应滤波算法(Current Statistical Model,CSM),采用前后速率估计的偏差来表达加速度的扰动,提出加速度扰动统计方程来自适应地调整目标加速度。宫淑丽研究了将交互式多模型(Interacting Multiple Model,IMM)滤波算法应用到机场场面监视雷达对运动目标的跟踪中,利用无迹卡尔曼滤波( Unscented Kalman Filter ,UKF)与IMM相结合的UKF-IMM算法对场面雷达监视的飞机的运动进行跟踪建模。但滤波算法计算复杂,所建立的目标运动模型与目标实际运动方式并不一定匹配,且预测时间短。
周龙等建立完全基于速度剖面的4D轨迹预测模型,运用数据挖掘的方法对历史滑行速度数据进行拟合分析,建立一条标准的滑行速度剖面实现对场面航空器的轨迹预测。该模型不依赖于空气动力学和牛顿力学模型,不需要辨识动力学参数,适用于预测时间较长的情况,且从实际出发,能够达到提高和保证预测精度的目的。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国