

发展概况
早期的飞机主要靠目视导航。20世纪20年代开始发展仪表导航。飞机上有了简单的仪表,靠人工计算得出飞机当时的位置。30年代出观无线电导航,首先使用的是中波四航道无线电信标和无线电罗盘。40年代初开始研制超短波的伏尔导航系统和仪表着陆系统。50年代初,开始采用惯性导航系统。50年代末出现多普勒导航系统。60年代初开始使用远程无线电罗兰C导航系统,作用距离达到2000km。为满足军事上的需要,还研制出塔康导航系统,后又出现伏尔塔康系统及超远程奥米加导航系统,作用距离已达到lOOOOkm。1963年出现卫星导航。70年代以后发展全球定位导航(GPS)系统。2
系统组成一种近程无线电导航系统,全名为甚高频全向方位导航系统。1950年被规定为国际标准民用导航系统。它由机载甚高频全向信标接收机、显示器和地面甚高频全向方位导航台组成。导航台发射以30转/秒旋转的心脏线方向图(见飞行器天线),在机载接收机输出端产生30赫的正弦波,其相位随飞机相对导航台的位置而变化,称为可变相位信号。与此同时,导航台还发射一个以固定30赫参考频率调制的全向信号。在机载接收机输出端又得到一个不变相位的30赫正弦波,称为基准相位信号。在地面导航台中使这两个30赫低频信号的相位在磁北子午线上相同。比较机载接收机输出的两个信号的相位,可确定地面导航台相对飞机的方位角,并将这方位角显示在显示器上。这就像以导航台为中心向四周辐射无限根直线,每一根线代表一个角度值。机载接收机和显示器的作用相当于确定和显示飞机处于那根线上。如果与测距器(DME)组成伏尔-DME标准近程导航系统,还可测出飞机至导航台的距离,据此可确定飞机在空间的位置。还可以按两个导航台相对飞机的方位角来定位,但须同时接收两个不同导航台的信号。伏尔导航系统工作于甚高频(112~118兆赫),抗干扰能力较强,测向精度一般为±1°,机载设备简单、轻便。伏尔导航系统的缺点是发射电波受视线限制和测向精度受场地影响较大。多普勒-伏尔导航系统就能够减少场地对测向精度的影响(见无线电导航)。
伏尔导航系统的基站拥有两组天线系统,一组将30 Hz的信号调制到载波上并进行全向广播。另一组天线为有向天线,以每秒30圈的频率转动,该天线发出的载波上也调制有一个30 Hz的信号,但此信号的相位随着天线转过的角度而改变,当指向天线指向正北时,两条天线发出的30 Hz信号的相位刚好相同。用户机通过对比接收到的两组信号的相位差.即可得出自身与基站的方向关系。3
原理伏尔导航系统通过比较两个30赫信号的相位来确定飞机对伏尔台的方位。一个30赫信号是固定的基准相位信号,先在9960赫副载频上以 ±480赫频偏调频,用副载频再对甚高频调幅,以 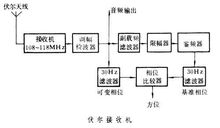 全向方式辐射。一个30赫信号是可变相位信号,用两对正交奥尔福德环形天线在双边带上辐射旋转∞场型。天线系统两种辐射输出合成为旋转30次每秒的心脏形场型。载频上还有以1020赫调幅的莫尔斯码识别信号和话音。在接收端,外来信号经放大、调幅检波后分成三路:一路经副载频滤波、限幅、鉴频和30赫滤波后输入比相器,这是固定相位信号;一路经30赫滤波直接至比相器,这是可变相位信号;再一路是莫尔斯识别码和话音输出。比相器对两个相位信号比相,得出飞机对伏尔地面台的磁方位角。
全向方式辐射。一个30赫信号是可变相位信号,用两对正交奥尔福德环形天线在双边带上辐射旋转∞场型。天线系统两种辐射输出合成为旋转30次每秒的心脏形场型。载频上还有以1020赫调幅的莫尔斯码识别信号和话音。在接收端,外来信号经放大、调幅检波后分成三路:一路经副载频滤波、限幅、鉴频和30赫滤波后输入比相器,这是固定相位信号;一路经30赫滤波直接至比相器,这是可变相位信号;再一路是莫尔斯识别码和话音输出。比相器对两个相位信号比相,得出飞机对伏尔地面台的磁方位角。
性能与特点性能伏尔导航系统应用在航路上和终端区。在航路上,它构成航道和航道网的基准,也是仪表飞行时的必要装备。航路上使用的伏尔台的辐射功率为 200瓦,作用距离随飞行高度而变化。在小高度上仅30海里,大高度上最远可达200海里。终端区伏尔台用于引导飞机进场,辐射功率50瓦,作用距离25海里以上。终端伏尔台与仪表着陆系统中的航向信标使用相同频段,即108~112兆赫,装备仪表着陆系统的机场不再装备伏尔导航系统。
优点伏尔导航系统与地美依导航系统合装在一起成为极坐标导航方式,既提供方位,又提供距离。地美依导航系统与塔康导航系统的测距部分完全相同,伏尔导航系统与塔康导航系统合装在一处,就是伏尔塔克导航系统,属于军用和民用共用系统。
伏尔导航系统的计算准确度为±3.9°(95%概率),实际准确度为±4.5°(95%概率)。伏尔用于监测站监视信号状态。现代伏尔地面系统由遥测遥控站进行管理,机上设备带有视觉告警装置。
缺点伏尔台发射信号存在多径反射干扰的缺点,对选择设台场地有一定要求。多普勒伏尔导航系统对于环境要求有所降低。为了提高伏尔导航系统的准确度,可改用多瓣伏尔导航系统,即精密伏尔导航系统。现代伏尔地面系统正以固态电子器件取代电子管。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国