

带有独立定时器的测距器的工作原理如图所示。图中的定时器产生一个由基准振荡器形成的时间(或相位)标 准。在测距开始之前.将定时器I和定时器Ⅱ相互校对好,使其起始时间(或相位)相同。定时器I控制发射机的发射时间(或相位),当信号经过一定的传播时间被接收机接收后,与定时器Ⅱ的时间进行比较,测量出时间差(或相位差)后即可确定电波的传播时间r,然后按下述公式即可求得所测
准。在测距开始之前.将定时器I和定时器Ⅱ相互校对好,使其起始时间(或相位)相同。定时器I控制发射机的发射时间(或相位),当信号经过一定的传播时间被接收机接收后,与定时器Ⅱ的时间进行比较,测量出时间差(或相位差)后即可确定电波的传播时间r,然后按下述公式即可求得所测
距离,即R=c×r。
由于这种方式是直接利用发射机辐射的信号,所以工作距离较近,适合于近距离导航参数的计算。
不带独立定时器的测距不带独立定时器的测距器根据目标的特点可分为无源反射式和询问回答式两种。
(1)无源反射式测距
图为无源反射式测距器的工作原理图。此类测距器的定时器兼有控制发射机的起始时间与测量时间间隔的基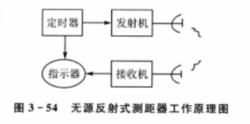 准时间两种功能。距离计算公式为
准时间两种功能。距离计算公式为

式中,r为电波总的传播时间。
与带有独立定时器的测距方式相比,由于是无源反射,因而接收到的信号强度较弱。为了保证正常工作,需要有较大的发射功率和较高的接收灵敏度。雷达测量目标的距离和在飞行器上测量距地面的相对高度多采用该方式。
询问回答式测距询问回答式测距与无源反射式测距的不同之处在于,由接收机和发射机组成的回答器代替了原来的无源反射目标,而询问器则与无源反射式测距器的组成相同。1
相关设备测距系统是无线电测量设备中实现距离测量功能的系统,它是接收机完成信号捕获后的主要功能之一,一般称为测距机。测距系统的发展经历了从电子管阶段、晶体管阶段,到中、小规模集成电路阶段,再到大规模集成电路阶段和以数字信号处理为主的数字化阶段。现已逐步向功能模块化、软件化的方向发展。测距系统的功能也从跟踪测量单个目标,发展到不仅能对同一波束内的多个目标进行连续跟踪,而且能对不同波束内的多个目标进行跟踪和测量。另外,采用数字化、软件化、模块化技术和相参积累、杂波对消、脉冲压缩等信号处理技术,极大地提升了测距系统的测距精度和跟踪能力。2
系统举例用于降落阶段自40km(距跑道400km)高度起到接地前的测距。无线电测距仪系统的机载部件,也就是17M900,由4台余度询问器和4副天线组成,总重85.5kg。航天飞机达到4km高度时,这些机载部件向位于拜科努尔航天发射场的6个测距设备单元(DME)发射脉冲对,然后测距设备单元通过其他频率将脉冲对回传至航天飞机。航天飞机将信号往返所需的时间转换成其距应答机的距离。系统还可间接提供俯仰和方位数据。
地面终端中的3台布置在跑道的一端外,另外3台布置在跑道的另一端外。每3台终端为一组,每组中的1台终端沿跑道中线布置,距跑道中心大约20km,而另外2台则布置在跑道两侧,距跑道中心不超过60km。6台终端中的每一台都有一个唯一的编码应答,使“暴风雪”号的Biser-4计算机可以选择3个精度最高的终端并使用其测距值。所选择的每一个终端每秒会被询问60次,是当时航空标准航路中测距设备询问频率的近4倍。每一台终端通过2副天线进行发射,一副水平偏振,另一副垂直偏振,这样,“暴风雪”号即使处于极端的俯仰或横滚机动,也可通过其圆偏振天线接收到强信号。当航天飞机达到4km高度时,无线电测距仪系统询问机切换至具有微波着陆系统相同精度的测距设备单元,测距设备单元位于跑道的两端。美国航天飞机上没有类似无线电测距仪系统的设备。3
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国