

定义
船舶在吃水达到其夏季载重线时的船体、机械、设备、备件、货物、燃料、淡水和船员的重量之和就是满载排水量。满载排水量和空载排水量之差即船舶载重量。
排水量计算公式排水量的计算公式如下:
排水量(长吨)=长*宽*吃水*方模系数(立方英尺)/35(海水)或36(淡水)(立方英尺)
排水量(公吨)=长*宽*吃水*方模系数(立方米)/0.9756(海水)或1(淡水)(立方米)
排水量吨位可以用来计算船舶的载重吨;在造船时,依据排水量吨位可知该船的重量;在统计军舰的大小和舰队时,一般以轻排水量为准;军舰通过巴拿马运河,以实际排水量作为征税的依据。
与其他排水量的区别舰艇在静止水中船体入水部份所排开水的重量称为排水量,计量单位为吨(Tons);对水面舰而言,排水量等于舰艇重量, 对潜水舰而言,排水量是可调节的,当排水量大于艇重时舰艇上浮,当排水量小于艇重时舰艇下沉。
轻(Light又称空载)排水量包含舰体,机器,武装但不包含人员,燃油,滑油,弹药,给养,淡水,备用锅炉水等。
标准(Standard)排水量包含舰体,机器(航行备便状态),武装,全额人员,弹药,给养,淡水但不包含燃油,滑油,备用锅炉水。
满载(Full Load)排水量为标准排水量再加上燃油,滑油,备用锅炉水到保证可到达足够的全速或续航力。
正常排水量为标准排水量再加上半数的燃油,滑油,备用锅炉水等;主要是出厂公试时的状态。最大排水量为满载排水量再加上装满所有储藏空间的备用燃油,滑油,备用锅炉水。潜艇分为水面(surfaced)排水量与水下(Dived)排水量,运输舰与商船通常只标明空载排水量和满载排水量。1
测量方法及原理传统方法目前国际上常用的方法是几何测量法,包括邦戎曲线法、静水力曲线法以及平均型吃水配合各种修正法。这些方法的基本原理都是利用全站仪测量船体一定高度的特征点拟合出断面的面积,再用断面面积乘以断面间的高度累加算出排水量。这些方法的优点是快速简便,但对于包含有大曲面构造的船体,几何测量法的测量精度难以满足船舶排水量精确计量的需求。因此,为了提高排水量计量的精度,需要进一步提高船体测量点的密度和数据完整性。
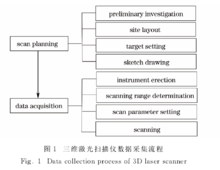
三维激光扫描法近年来迅速发展的三维激光扫描技术,可以弥补传统排水量计量方法的缺点。三维激光扫描技术可以大面积获取被测对象表面的三维坐标数据,并具有数据获取速度快、实时性强、数据量大、主动性强、点位密集、精度高等突出优点,已成功应用于文物保护、城市建筑测量、飞机船舶制造等领域。基于三维激光扫描技术对船舶排水量计量方法进行了研究,提出了一种基于点云切片技术的排水量计量方法,将船体表面空间的三维点云数据分层,利用每一层的切片点云数据计算该层的上下船体轮廓面积,再依据切片的厚度求得该层切片的体积,最后对每层切片体积进行累加计算不同高度的船体体积,计算出某一高度下的船舶体积在数值上就等于某一状态下船舶排开水的体积,依照此方法,即可获得船舶在不同状态下的实际排水量,即在不同的吃水深度时船舶所排开的水的体积。构建船体三维模型,并利用Geomagic Studio获取模型不同高度处的标准体积,与切片累加的体积进行对比,从而验证该方法的精度。
由于环境等因素,扫描过程中会产生许多噪声点,因此,需对点云进行预处理,预处理的结果直接影响后期的建模效率和精度。点云预处理主要包括点云配准、去噪、空洞修补以及压缩过程。将船体点云分割成若干切片,切片上下表面为船体的横截面。再根据扫描分辨率,取出横截面上下5mm范围内的点云数据,将其投影到xoy平面内,获取船舶轮廓特征点云,并计算轮廓点云的重心坐标;再对轮廓点云进行排序,相邻两点与重心组成一个三角形,计算出三角形的面积,将所有三角形面积相加即获得横截面面积。最后根据切片上下横截面面积和切片厚度计算切片的体积,并将所有切片体积累加即获得排水量。点云轮廓线生成主要有两类算法:投影平面法和虚拟边缘法。投影法简便易行效率高,但容易形成较多冗余点,虚拟边缘法生成的轮廓点云质量更好,但计算相对复杂。投影法冗余点较多的缺陷在后续特征点重心化环节可以得到解决,因此采用该方法生成轮廓点云。
利用全站仪进行计量的传统方法存在着点集密度小、断面面积计算精度低和断面间的高度选取随意等缺陷。立足于点云切片,并应用数字图像处理的方法提取了船舶轮廓特征点云,高精度地计算出切片上下横截面的面积,综合考虑算法执行效率和排水量计量精度两方面因素,分析确定出最佳切片厚度,使之可以适应不同的点云数据。实验结果表明能够以较高的精度实现船舶排水量的计量,为船舶排水量的计量提供了一种全新的技术手段。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国