

基本概念
用微波作载波信号测量两点间距离的相位式测距仪器。 主要由分别架设在待测距离两端的 主台和副台组成。由主台向副台发 射的测距信号,其相位为ωAt;副台 接收主台来的测距信号,其相位为 ωAt-ωAtD; 副台也发射测距信号, 其相位为ω′At。这两种信号在副台 混频后得到低频测相信号的相位为(ωA-ωA′)·t-ωAtD;副台向主台发射上述两种信号,即 测距信号和低频测相信号,其到达 主台后相位分别为:ωA′t-ωA′tD;(ωA-ωA′)t-(ωA-ωA′) tD-ωAtD,在主台两测试信号混频后得到低频 测相的AM信号,其相位为(ωA-ωA′)·t+ωA′tD;另一路线则形成低频测相的FM 信号,其相位仍为(ωA-ωA′)t-(ωA-ωA′) tD-ωAtD。在主台通过测相电路比测AM和 FM的相位差,显然其相位差为φ=2ωAtD。
星间微波测距技术研究现状目前,国外利用卫星进行地球重力场探测的主要系统,大致包括在2000年7月发射的地球科学应用卫星(CHAMP) ,2002年3月发射的重力场探测和气象实验卫星(GRACE),以及在2010年发射的重力场和静态洋流探测卫星(GOCE) 这些卫星探测系统进行重力场测量的工作原理,基本上都是通过对在轨运行航天器轨道摄动情况的精确测量,并通过高灵敏、高精度星载加速度计的测量,分离排除了各种非保守力,如大气阻尼、太阳辐射光压、卫星轨道机动等对在轨卫星运行的影响后,推演出重力场的分布特性。而且,为了尽可能减小地球以外其它星体(如太阳、月亮等)保守力(引力)对测量结果的影响成份,重力场探测卫星大都选择在较低轨道(如300--SOOkm)运行。此时,其它星体引力对航天器在轨摄动的影响相对地球的影响会小得很多,以使分析处理结果对地球重力场的描述能更准确一些。
在这些探测系统中,大体采用了两类星间链路,一类是高低轨道的星间链路,此时高轨卫星为GPS卫星,低轨卫星则是专用的探测卫星,它通过GPS接收机与高轨GPS星座卫星相链接(如CHAMP,即由若干高轨卫星(如GPS星座卫星)跟踪测量低轨卫星的轨道摄动,以确定扰动重力场,通常称为高一低SST模式(HL-SST。另一类除上述高、低轨道星间链路外,运行于低轨道的探测卫星系统本身就至少包括两颗卫星(如GRACE),每颗卫星不仅通过GPS接收机与GPS星座卫星联系,而且处于同一轨道运行的两颗探测卫星(相距约220士SOkm)之间也有星间链路,通常称为低一低SST (LL-SST)。目前提出的星间链路主要完成距离、距离变化率的测量,而且主要考虑采用K波段微波测距系统或激光测距系统。
利用第一种高一低SST技术,所测定的低阶重力场精度可以较现有模型(星间跟踪和卫星梯度观测模式)提高1个数量级以上,使对应的低阶大地水准面精度达到毫米级。利用第二类技术,可供处理的探测数据大幅度增加,而且低一低SST模式(LL-SST)测速、测距精度更高,达}m量级,该精度也是星间微波测量所达到的最高技术水平。其一个月的数据所解算出的地球重力场模型比过去三十年的综合重力场资料所得到的低阶重力场测量精度高两个数量级,且中长波地球重力场测量精度也相应提高一个数量级以上,己成为其它国家的主要分析研究对象。GRACE的巨大成功引起了人们对于其后续计划的兴趣,其中包括更高精度的干涉激光测距系统,测量精度可以达到1 nm/s,配合其它星上仪器,有望将GRACE目前的空间分辩率提高到100 km。
同时,编队卫星在体积、性能、费用等方面比单颗大卫星具有明显的优势。但要完成地面动目标探测等功能,必须要提供精确的星间位置信息,星间高精度测距技术成为卫星编队飞行的关键技术之一。
美国空军研究实验室目前正在进行’'21世纪技术卫星”(TechS at-21)计划,它由3颗微小卫星组成,星间测距精度可达1厘米,它的发射与运行将在航天史上首次突破并演示验证三维非线性编队飞行技术,从太空监视与跟踪地面活动目标。该计划原定2003年发射现推迟到2006年,由于技术复杂可能再度推迟。美国还有在2008年开始部署,由24颗低轨小卫星和3颗备份星组成的”天基雷达监视计划”,以及美国航天司令部在其《长期发展规划一2020设想》中勾画出的天基”全球防御信息网”等计划。
我国LL-SST系统的研制正处于起步阶段,重力卫星有效载荷中的高精度加速度计、双频GPS接收机,国家在“十五,,期间己经投入了大量财力和人力进行预研,取得了一定的成果,但KBR系统没有安排预研。KBR系统是微米量级的测距系统,在我国基本还是空白。由于前期投入力度不大,研制处于起步阶段,能否开发出星间高精度K频段测距系统将成为我国重力卫星能否成功的瓶颈和关键之一。1
相位法微波测距基本原理微波是指电磁波波段中频率为300MHz到300GHz的电磁波,所对应的电磁波长范围为在1米到1毫米。利用微波作为载波进行测距具有不受天气情况影响,测点布置灵活等优点。相位法测距是通过间接测定发射测距信号和接收到的测距信号之间的相位差进行测距,具有测量精度高的优点。
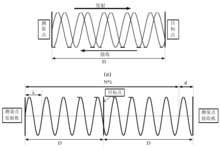
相位法微波测距是利用无线电波的微波段作为载波,运载测距信号,进行精密测距。利用微波作为测距信号的载波,可以避免激光测距仪发射激光带来的测距精度受气象条件影响不能全天候测量,以及激光系统是一个精密的光学系统不易维护等问题。假设测距信号的角频率为w,经过距离D的传输后到达待测目标后沿原路返回的测距信号为I= A cosw(t0 - Δt)测距信号往返待测距离D之间的时间差为 Δt,只要能够测定时间差我们就以求得待测距离。但是通过直接测量时间差来测距的精度很低,如时间测量精度为lns时,代入测距公式 Δp=cΔ(Δt),计算得到测距精度仅为0.3 m,而在实际工程应用中三维位移监测的精度要求为厘米甚至是毫米级,所以通过测量时间差测距远不能满足要求。相位法激光测距采用测相的方法实现了毫米级精度的距离测量,为了满足三维位移变形监测的精度要求,采用相位测距的方法来提高测量精度。2
相位法测距是间接测定发射的测距信号和往返待测距离传输后接收的测距信号包含距离信息的相位差来达到测距的目的。相位法测距的原理如图所示。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国