

简介
主动式遥感(active remotesensing)又称“有源遥感”。遥感仪器在遥感平台上对被探测目标发射一定波长的电磁波,并接收物体的回波信号。通过分析回波的性质、特征及其变化来识别物体。这种遥感方式称为主动式遥感。主动式遥感器有荧光扫描仪、微波散射计、激光雷达、侧视雷达等。资料的表现形式有图像式和非图像式两种。2
主动式遥感是遥感按照传感器工作原理不同分类的一种,另外为被动式遥感。被动式遥感是利用传感器,接收被探测物体的电磁波,以获取物体的信息。
现代遥感技术在航空摄影和像片判读技术基础上,结合航天、信息、半导体、计算机等技术逐渐形成综合性探测技术,能从遥远的天空对地球及其周围环境进行大范围、高速度和不间断的探测,不受任何政治和地理条件限制,在军事上具有重要作用,已广泛应用于军事侦察、导弹预警、海洋监视、武器制导、军事测绘和气象探测等方面。遥感技术现已从单纯被动式向被动、主动相结合;从单一电磁波向多波种相结合;从半天候向全天候;从定性向定量遥感发展。3
主动式大气遥感人们在气象观测中早就采用了向大气发射各种波信号,然后从接收到的大气回波中提取气象信息的遥感技术。随着现代科技尤其是物理学中声、光、电技术的发展,可以利用的信号越来越多,探测的内容也不断扩大。与被动式遥感相比,主动式遥感探测装置虽然体积、功耗增大许多,但它具有不扰动被测环境(这是直接探测仪不可避免的误差来源)、不受大气自身信息微弱的限制、信号种类和强弱的可调可控性强等特点,提高了探测精度,也扩大了探测领域,目前已成为地面和机载探测的重要手段,广泛应用于大气湍流、中小尺度天气系统结构、大气边界层物理过翟和环境监测等研究。
主动式探测器大多在信号源的声、光后冠以雷达两字,“达”(dar)字是“detection and ranging”的词首缩写,其意义不言而喻,都是利用空间分布的散射体为目标所产生的回波进行“探测”与“测距”。散射体可以是整个连续具有均匀散射的介质,也可以是一些散射中心的集合体,每个中心都具有特定的散射强度和角分布形式。一般来说,与探测仪信号相互作用最强的大气结构的尺度,约为波长的二分之一。比这更小的目标被称为“瑞利粒子”,它们的散射与波长关系密切,随波长的负四次方而衰减,因此,可以据此来评估不同目标的最佳探测方式。
例如,对5~50μm的云滴,光雷达可得到很强的回波,但穿透距离较短;而短波长的微波雷达散射要弱些,对云的穿透性也要好一些;长波长的雷达和声雷达可不考虑云的散射,而给出雨滴与大气折射率起伏的信息。一般来说,可见光雷达适用于小于1μm的粒子以及水汽、臭氧等气体成分的探测,红外光雷达适用于1~10μm的大粒子,短波长(0.3~30cm)雷达适用于云滴,一般雷达适用于雨滴、温湿变化,声雷达适用于温度和速度变化等。而多普勒雷达还可用于目标物速度与风速的遥感。在主动探测中,探测仪的发射波长与天线结构(如孔径直径)对系统的角分辨率(波束宽度)影响很大。分辨率以光雷达最高,声雷达最低。4
传感器类型雷达传感器雷达属于主动式传感器,在主动微波遥感中,辐射源是观测目标对雷达发生的微波信号的散射强度,即后向散射系数。
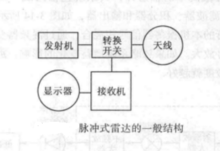 侧视雷达成像与航空摄影不同:航空摄影利用太阳光作为照明源,而侧视雷达利用发射的电磁波作为照射源;雷达是根据回波时间记录数据,而摄影机或光学-机械扫描系统是根据系统视角记录数据的。它与普通脉冲式雷达的结构大体上相近。图1为脉冲式雷达的一般组成格式,它由一个发射机、一个接收机,一个转换开关和一根天线等构成。
侧视雷达成像与航空摄影不同:航空摄影利用太阳光作为照明源,而侧视雷达利用发射的电磁波作为照射源;雷达是根据回波时间记录数据,而摄影机或光学-机械扫描系统是根据系统视角记录数据的。它与普通脉冲式雷达的结构大体上相近。图1为脉冲式雷达的一般组成格式,它由一个发射机、一个接收机,一个转换开关和一根天线等构成。
发射机产生脉冲信号,由转换开关控制,经天线向观测地区发射。地物反射脉冲信号,也由转换开关控制进入接收机,接收的信号在显示器上显示或记录在磁带上。
雷达接收到的回波中,含有多种信息,如雷达到目标的距离和方位、雷达与目标的相对速度(即作相对运动时产生的多普勒频移)以及目标的反射特性等。其中距离信息由脉冲返回的时间和电磁波的传播速度决定。雷达接收到的回波强度是系统参数和地面目标参数的复杂函数。系统参数包括雷达波的波长、发射功率、照射面积和方向和极化等,地面目标参数与地物的复介电常数、地面粗糙度等有关。5
激光雷达传感器激光是具有大功率、高度方向性的光束,在空间上是高度相干的。
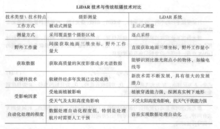 机载激光雷达系统(Light Detection And Ranging,LiDAR)是一种新型的综合应用激光测距仪、GPS和惯性导航系统(Inertial Navigation System,INS)的快速测量系统,可以直接联测地面物体各个点的三维坐标。该系统还可以集成高分辨率数码相机。用于同时获取目标影像,具有数据密度高、数据精度高、植被穿透能力强、不受阴影和太阳高度角影响、人工野外作业量少等特点,已被广泛应用于地面三维数据获取和模型恢复、重建等,显示出巨大的应用前景,成为三维数据模型获取的一种重要手段。LiDAR与传统航摄技术相比,具有以下特点,如表1所示。5
机载激光雷达系统(Light Detection And Ranging,LiDAR)是一种新型的综合应用激光测距仪、GPS和惯性导航系统(Inertial Navigation System,INS)的快速测量系统,可以直接联测地面物体各个点的三维坐标。该系统还可以集成高分辨率数码相机。用于同时获取目标影像,具有数据密度高、数据精度高、植被穿透能力强、不受阴影和太阳高度角影响、人工野外作业量少等特点,已被广泛应用于地面三维数据获取和模型恢复、重建等,显示出巨大的应用前景,成为三维数据模型获取的一种重要手段。LiDAR与传统航摄技术相比,具有以下特点,如表1所示。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国