

地平坐标系
地平坐标系是一种最直观的天球坐标系,和我们日常的天文观测关系最为密切。例如,在晴朗的傍晚,观测者经常可以看到人造卫星在群星间的运行,和大量的流星现象,它们的运行速度都很快,用什么方法能够快速、简便地记录下卫星或流星的位置呢?最简便的方法就是记下某瞬间该卫星或流星的地平方位角和地平高度角,这就是地平坐标系。地平坐标系能把天体在当时当地的天空位置直观生动的表示出来。一般用于天文测量、航海和航空的定位观测等方面。
地平坐标简介地平坐标是以地平经度和地平纬度两个坐标表示天球上任一天体位置的坐标。地轴的无限延长即为天轴,天轴与天球交于与地球北极相对应的天北极和与地球南极相对应的天南极。通过天顶和天北极的地平经圈(当然也通过天底和天南极),与地平圈有两个交点;靠近天北极的那个点为北点,靠近天南极的那个点为南点。北点和南点分别把地平圈和地平经圈等分。根据面北背南、左西右东的原则,可以确定当地的东点和西点,即面向北点左90°为西点,右90°为东点。这样,就确定了地平圈上的东、西、南、北四方点。南点是它的起点,午圈所在的平面是它的起始面。地平经度为方位,地平纬度为高度。地表各点位置不同,地平坐标系的基本圈(地平圈)和基本点(天顶和天底),也随之不同。地平坐标值因地因时而不同,随时间和地点的变化而变化是该坐标的显著特征。
一种确定地平坐标的简易方法天球仪是学习天文知识最常用的教具和学具,是天文爱好者观测星空最得力的帮手之一。一般的天球仪上,子午圈、地平圈、天赤道、黄道等大圈上都有刻度,比如:天赤道上每隔15°做一个标记,黄道上每隔15°有个节气标记,地平圈、子午圈上都有精确到1°的刻度。借助于这些刻度,我们可以很容易地读出天体的赤经、赤纬以及它在某一确定时刻的时角坐标。但是,由于天球仪上大多都没有画出地平经圈和黄道经圈,所以,借助于天球仪,除了天体上中天时的高度、方位可以很容易读出外,其它时刻天体的地平坐标和黄道坐标都无法直接读出。虽然可以借助于球面三角公式进行球面坐标的换算,而且换算结果比较准确,但对于一个初学者来说,很显然这是不现实的。为此,这里介绍一种用自制软尺在天球仪上确定天体的地平坐标和黄道坐标的简易方法。
所谓自制软尺,实际上是一种自制的带有刻度的纸片或胶片。软尺的宽度取2厘米即可,长度则应当根据天球仪的大小而定,一般取1/4个子午圈的长度即可。软尺的刻度可以比照天球仪上赤经圈、天赤道或者黄道上的刻度来刻画,由于天赤道或者黄道上的刻度大多为15°一格,而赤经圈上则是每隔10°一格,所以,建议大家用赤经圈上的刻度来刻画软尺上的刻度,并用内插法将每一格进行分割,每隔1°刻画一条短线,每隔5°刻画一条长线标记。刻画自制软尺的刻度时应当注意:软尺的短边一定要与天赤道中心线重合,长边与赤经圈中的一条重合,纸片或胶片一定要紧贴天球仪表面,这样做出的尺子才准。
自制软尺做好后,就可以用来确定天体的地平坐标了,方法如下:
用自制软尺确定任意时刻某一天体的地平坐标。将软尺始端与地平圈中心线重合,长边过该天体中心,另一端对准天顶。此时,就可以根据软尺上的刻度读出该天体的地平高度,保持软尺不动,就可以在地平圈上根据软尺的位置读出该天体的方位。例如,用天球仪确定北纬30°地方6月22日21点时“心宿二”的地平坐标。首先将天球仪仰极的地平高度调整为30°(根据子午圈上的刻度完成),然后找到6月22日太阳的位置(夏至点),再将太阳从上中天向西转动9个小时即135°。此时,心宿二位于南偏东半天空中。用自制软尺测量此时心宿二的地平坐标,结果:高度约+31°,方位约-22°(南偏东22°)。当然,如果将天球仪换成《活动星图》就更方便了。1
地平坐标双轴跟踪系统为了提高光伏发电系统的发电量,减少系统的运行成本,通常在实际应用中采用为光伏阵列安装自动跟踪系统的方式。
自动跟踪系统根据光伏阵列采光面角度变化的轴向选择不同,分为单轴跟踪和双轴跟踪。单轴跟踪又分为东西水平轴跟踪、南北水平轴跟踪和极轴跟踪3种;双轴跟踪分为地平坐标跟踪和赤道坐标跟踪。文献表明,对光伏跟踪系统的运行性能长期测量,实验数据记录显示双轴跟踪方式提高发电量30%~40%。
地平坐标双轴跟踪系统分为高度角跟踪和方位角跟踪。地平坐标双轴跟踪系统的机械结构一般采用齿轮传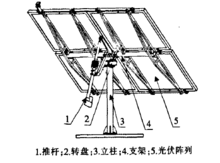 动机构带动光伏阵列转动实现方位角跟踪,同时通过推杆推动光伏阵列翻转实现高度角跟踪,如图所示。由于方位角的控制,只需根据齿轮传动机构的设计参数,就能容易地得到带动光伏阵列转过每个角度所对应的齿轮传动机构驱动电机所需的脉冲数。因此,以下着重介绍高度角的控制与检测原理。
动机构带动光伏阵列转动实现方位角跟踪,同时通过推杆推动光伏阵列翻转实现高度角跟踪,如图所示。由于方位角的控制,只需根据齿轮传动机构的设计参数,就能容易地得到带动光伏阵列转过每个角度所对应的齿轮传动机构驱动电机所需的脉冲数。因此,以下着重介绍高度角的控制与检测原理。
首先,根据太阳一地球的运行原理,计算出某地某时刻的太阳高度角,再根据选用的推杆的设计参数建立高度角的控制与检测模型。高度角的检测模型是先将太阳高度角转化为推杆电机所对应的脉冲数,然后向推杆电机发出动作指令,推杆将光伏阵列翻转至指定高度角。并通过推杆电机自带的编码盘进行实时检测反馈,从而达到高度角的精确定位。同时,采用高分辨率的光电传感器,在有成束光的条件下,捕捉成束光,对太阳的高度角方向进行实际跟踪。并对高度角的理论计算结果进行修正,以使在无成束光时亦能对太阳高度角方向进行精确跟踪。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国