

简介
模糊自适应控制器的研究最早是由Procyk和Mamdani于1979年提出的,称作语言自组织模糊控制器(SOC)。在模糊控制器的参数存在不确定的变化或者未知时,模糊自适应控制器可以根据系统的运行状态获取过程状态的连续信息,通过在线辨识和修正过程的模糊模型,从中获得所需要的模糊控制规则,实现在线模糊控制规则的自学习,自动调整模糊控制器的参数,以便适应环境条件或过程参数的变化以及由于人的经验获得模糊控制规则的主观性和局限性,使系统大大提高适应能力,获得较强的鲁棒性,维持控制系统所要求的性能准则。
由于模糊自适应控制系统对参数变化和环境变化不敏感,能用于非线性和多变量复杂对象,不仅收敛速度快、鲁棒性好、而且可以在运行过程中不断修正自己的控制规则来改善控制性能,因而受到了控制界的广泛重视。1
模糊自适应控制器的基本框架模糊自适应控制器的基本框架如图1所示。从图1可以看出,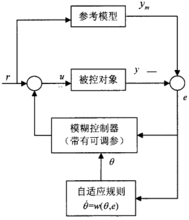 在自适应模糊控制的过程中,自适应规则的设计是依据控制性能指标来设计的,随着环境的变化自适应律不断用来修正模糊控制器中的参数。而在非自适应模糊控制系统,模糊控制器是事先已经设计好的,控制器的参数不依控制性能而改变,这就可能导致控制失效。因此,自适应模糊控制具有较好的控制性能。
在自适应模糊控制的过程中,自适应规则的设计是依据控制性能指标来设计的,随着环境的变化自适应律不断用来修正模糊控制器中的参数。而在非自适应模糊控制系统,模糊控制器是事先已经设计好的,控制器的参数不依控制性能而改变,这就可能导致控制失效。因此,自适应模糊控制具有较好的控制性能。
由于自适应律在实时控制过程中能够不断地学习被控对象的动态特性,所以自适应模糊控制对被控对象的信息要求不高。即当专家给出的经验有限,或者规则总结的粗糙,这些都可以通过自适应模糊控制来改善。2
与传统的自适应控制器的异同点模糊自适应控制器与传统自适应控制器具有如下异同点:
相同点(1) 基本框架和原理或多或少有些相同;
(2) 在控制系统设计和分析过程中使用的数学工具非常相似。
不同点(1) 与被控对象的动态特性和与控制策略有关的专家经验被嵌入模糊自适应控制器中,而传统的自适应控制是不考虑这些的;
(2) 模糊自适应控制器是一种非线性控制器,这种控制器对不同的被控对象来说可以是通用的,而传统的自适应控制器的结构因控制对象的不同而不同。2
(3) 与被控对象的控制策略以及动态特性相关人类知识可以比较容易的嵌入到模糊自适应控制系统中。
模糊自适应控制器的分类根据模糊控制器结构的不同,可将模糊自适应控制器分为间接型自适应模糊控制器和直接型自适应模糊控制器两种类型。
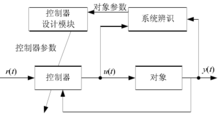
间接型自适应模糊控制器该模糊控制器可以是多个模糊逻辑系统的线性组合,用模糊逻辑系统来逼近系统的非线性项;通过在线进行模糊系统辨识得到控制对象的模型,然后根据所得模型在线设计模糊控制器,如图2所示。
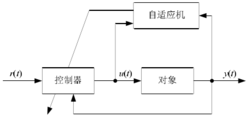
直接型自适应模糊控制器该模糊控制器只含有一个模糊逻辑系统。它根据实际系统性能指标与希望的性能指标之间的偏差,通过一定的方法来直接调整控制器的参数,如图3所示。12
 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国