

概念
所谓受控对象是指在一个控制系统中被控制的事物或生产过程,又称被控对象或控制对象。在自动控制系统中,一般指被控制的设备或过程为对象,如反应器、精馏设备的控制,或传热过程、燃烧过程的控制等。从定量分析和设计角度,控制对象只是被控设备或过程中影响对象输入、输出参数的部分因素,并不是设备的全部。例如:在精馏过程控制中,定回流控制系统的控制对象,只涉及到设备的回流管道;塔釜液位控制系统的对象,只与塔釜有关。
在简单控制系统中,工程上也有称被控参数为对象的,如流量控制、压力控制和温度控制等。控制系统中,作为广义的控制对象,除控制器(调节器)以外的执行器(调节阀)及测量变送装置都包括在内。作为狭义的控制对象,其端部参数(输入、输出)有被控参数、控制参数和扰动参数,它们通过控制对象的内部状态而相互联系。如果受控对象的特性不一样,其所需要的控制策略也会大相径庭的,最终控制效果也大不相同,我们可以用微分方程,状态方程或传递函数等数学方法来描述受控对象,并可以用其他传统和现代的方法来分析受控对象的特性,设计和校正相应的控制系统,达到对受控对象的有效和优化控制。
有关术语的解释控制对象的表征:在定量地设计和分析控制系统时,控制对象必须用有关参数随时间的变化规律(又称对象的动态特性)来表述,一般采用微分方程或状态方程的形式。这种用数学方程式定量地表示对象动态特性的形式称控制对象的数学模型。控制机理不同,对象的数学模型也不同。
控制对象的输入、输出量:干扰作用和调节作用为对象的输入量;被控参数为对象的输出量
单容控制对象:只有一个储蓄容积的控制对象。其动态特性可用一阶微分方程式表示。
多容控制对象:有两个或两个以上储蓄容积的控制对象。其动态特性需用二阶或二阶以上微分方程来表述。
受控对象的特性是指对象在受到干扰作用或调节作用后,被控参数是如何变化的,变化的快慢及最终变化的数值。2
参数选择被控参数的选择在被控制的设备或过程中, 控制系统设计时选取的被控参数和控制参数不同。例如:由温度控制的反应器(见图),通常选择夹套中冷却液流量数为控制参数,而被控参数的选择可有多种方案。最常见的控制方案是选取反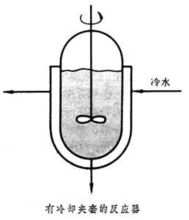 应器内的反应温度作为被控参数,此时的控制对象应包括夹套在内,冷却液与反应物之间传递热量的速率、反应流体的质量及其热性能等,都影响对象的特征。这些因素也就影响到控制系统的品质,设计时必须考虑。有些场合也可利用反应器内的压力作为被控参数,以间接达到快速、灵敏地控制反应温度的目的。这种情况的对象特性除考虑反应器本身外,还要涉及溶液蒸气压与温度的关系、反应器中气相压力与反应温度的关系等。
应器内的反应温度作为被控参数,此时的控制对象应包括夹套在内,冷却液与反应物之间传递热量的速率、反应流体的质量及其热性能等,都影响对象的特征。这些因素也就影响到控制系统的品质,设计时必须考虑。有些场合也可利用反应器内的压力作为被控参数,以间接达到快速、灵敏地控制反应温度的目的。这种情况的对象特性除考虑反应器本身外,还要涉及溶液蒸气压与温度的关系、反应器中气相压力与反应温度的关系等。
控制参数的选择在设计控制系统时, 控制参数也可能有多种选择,例如在蒸汽加热器的温度控制中,蒸汽量和凝液量都可作为控制参数。选择时必须考虑工艺合理、经济、响应快速等因素。当控制参数变动后,控制对象特性同样也要变化。
滑模变结构控制对象研究滑模变结构控制(简称 SMC)是变结构控制方法中的一种控制策略,这种控制策略与常规控制的根本区别在于控制的不连续性,即呈现出一种使系统“结构”随时变化的开关特性。该控制特性可以迫使系统在一定条件下沿规定的状态轨迹作小幅度。高频率的上下运动,即滑动模态或“滑模”运动。这种滑动模态是可以设计的,且具有很好的鲁棒性。
滑模变结构控制广泛应用于军工、航空航天、机器人、电力电子、一般工业过程、船舶、冶金、车辆、数控机床、泵机、采掘运输机械等控制领域,在模型跟踪系统、自适应系统、不确定系统等复杂系统中的应用具有良好效果。更具体地讲,可进行高精度伺服系统、电液伺服系统、坦克伺服系统等的控制、导弹寻的制导和目标拦截的应用、着陆小天体的导航、 制
导和控制问题、飞行器的轨道机动、姿态控制和附着交会、 远程自主水下航行器、 机器人、 导弹、飞船姿态的跟踪控制、航天器具有的柔性附件(包括太阳帆板、天线等)的振动抑制、 天文望远镜的伺服驱动系统、液压系统的控制、航空发动机控制系统、汽车防抱死制动系统、 驱动防滑系统的控制、 异步感应电机、交直流驱动系统、多电机的同步控制、 利用风能、
太阳能、燃料电池等清洁能源发电的分布式电源、电力机车辅助变流器、 单相电压型 PWM 整流器、DC/DC 开关变换器、APFC 电路系统、电子节气门开度的精确控制等。
模变结构控制作为一种非线性控制策略,广泛应用于机器人、航空航天、电力电子、交流伺服系统等控制领域。但作为一种理论,有它自身的适用性。随着控制对象阶数的升高,时间常数T的增大,滑模变结构控制的切换面及控制参数增多,整定的难度在加大。尤其对于高阶大惯性变参数对象,滑模对系统参数变化和外部扰动更敏感, 整定起来更困难。
而且,当被控系统施加未知干扰时, 滑模变结构控制有静差。虽然采用文献中的积分滑模、 非线性积分滑模可以减小稳态误差,但动态性能却变得很差。对于二阶、时间常数小的被控对象来说,滑模变结构的快速性为其在快速达到或跟踪给定值方面带来了无与伦比的优势。而且,参数整定简单,实现简单,快速的切换带来了更强的鲁棒性;对于高阶大惯性对象, 由于其本身的惯性,控制时间长,滑模切换少,较之二阶,鲁棒性变差。3

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国