

宽度优先搜索
宽度优先搜索又称广度优先搜索。其基本思想是:从初始节点S0开始进行节点扩展,考察S0的第1个子节点是否为目标节点,若不是目标节点,则对该节点进行扩展;再考察S0的第2个子节点是否为目标节点,若不是目标节点,则对其进行扩展;对S0的所有子节点全部考察并扩展以后,再分别对S0的所有子节点的子节点进行考察并扩展,如此向下搜索,直到发现目标状态Sg为止。因此,宽度优先搜索在对第n层的节点没有全部考察并扩展之前,不对第n+1层的节点进行考察和扩展。
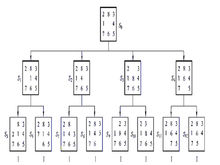 以九宫问题为例,对初始节点S0进行扩展,有四种操作有效,产生四个子节点S1、S2、S3、S4。对节点S1考察发现它不是目标节点,应对其扩展。节点S1有三种有效操作,但其中空格右移得到的状态是其父节点的状态,因此此状态无效,即S1节点仅有2个子节点S5、S6;对节点S2考察,同样只能生成2个子节点S7、S8;依次类推,可产生如右图的搜索树。
以九宫问题为例,对初始节点S0进行扩展,有四种操作有效,产生四个子节点S1、S2、S3、S4。对节点S1考察发现它不是目标节点,应对其扩展。节点S1有三种有效操作,但其中空格右移得到的状态是其父节点的状态,因此此状态无效,即S1节点仅有2个子节点S5、S6;对节点S2考察,同样只能生成2个子节点S7、S8;依次类推,可产生如右图的搜索树。
宽度优先搜索的盲目性较大,当目标节点离初始节点较远时,将会产生许多无用节点,搜索效率低,这是它的缺点。但是,只要问题有解,用宽度优先搜索总可以得到解,而且得到的解是路径最短的,这是它的优点。所以,宽度优先搜索是完备的搜索。
深度优先搜索深度优先搜索的基本思想是:从初始节点S0开始进行节点扩展,考察S0扩展的最后1个子节点是否为目标节点,若不是目标节点,则对该节点进行扩展;然后再对其扩展节点中的最后1个子节点进行考察,若又不是目标节点,则对其进行扩展,一直如此向下扩展。当发现节点本身不能扩展时,对其1个兄弟节点进行扩展;如果所有的兄弟节点都不能够扩展时,则寻找到它们的父节点,对父节点的兄弟节点进行扩展;依次类推,直到发现目标状态Sg为止。因此,深度优先搜索法存在搜索和回溯交替出现的现象。
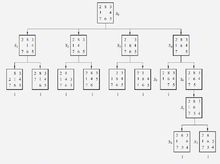 同样,以九宫问题为例,对初始节点S0进行扩展,有四种操作有效,产生S1、S2、S3、S4四个节点。先对节点S4考察发现它不是目标节点,应对其进行扩展,但其中空格上移得到的状态是其父节点的状态,因此此状态无效,即S4节点仅有2个子节点S5、S6;对节点S6进行考察发现不是目标节点,则进行扩展,得到S6的子节点S7;依次类推,可产生如右图的搜索树。
同样,以九宫问题为例,对初始节点S0进行扩展,有四种操作有效,产生S1、S2、S3、S4四个节点。先对节点S4考察发现它不是目标节点,应对其进行扩展,但其中空格上移得到的状态是其父节点的状态,因此此状态无效,即S4节点仅有2个子节点S5、S6;对节点S6进行考察发现不是目标节点,则进行扩展,得到S6的子节点S7;依次类推,可产生如右图的搜索树。
在深度优先搜索中,搜索一旦进入某个分支,就将沿着该分支一直向下搜索。如果目标节点恰好在此分支上,则可较快地得到问题解。但若目标节点不在该分支上,且该分支又是一个无穷分支,就不可能得到解。所以,深度优先搜索是不完备的搜索。
迭代加深搜索为克服深度优先搜索陷入无穷分支死循环的问题,提出了有界深度优先搜索方法。有界深度搜索的基本思想是:预先设定搜索深度的界限,当搜索深度到达了深度界限而尚未出现目标节点时,就换一个分支进行搜索。
在有界深度搜索策略中,深度限制d是一个很重要的参数。当问题有解,且解的路径长度小于或等于d时,则搜索过程一定能找到解。但是,这不能保证最先找到的是最优解,此时深度搜索是完备而非最优的。如d取得太小,解的路径长度大于d,则在搜索过程中就找不到解,此时搜索过程不完备。但是,深度限制d不能太大,否则会产生过多的无用节点。为了解决深度限制d的设置,可以采用这样的方法:先任意给定一个较小的深度限制,然后按有界深度搜索,如在此深度找到解,则结束;否则,增大深度限制,继续搜索。此种搜索方法称为迭代加深搜索。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国