

自适应控制的定义
目前关于自适应控制的定义有许多不同的论述,不同的学者根据自己的观点提出了各自关于自适应控制的定义,这里对其进行综合,定义为:在系统运行中,依靠不断采集控制过程信息,确定被控对象的当前实际工作状态,优化性能准则,产生自适应控制规律,从而实时地调整控制器结构或参数,使系统始终自动地工作在最优或次最优的运行状态。
自适应控制系统是在模仿生物适应能力的思想基础上建立的一类可自动调整本身特性的控制系统。其必须完成三个主要功能:①识别受控对象的动态特性;②在识别对象的基础上选择决策;③在决策的基础上做出反应或动作。
交通信号控制方式经过多年的发展,交通信号控制的方式也发生了很大的变化。从最初的定时控制,发展到车辆感应控制和自适应控制。目前,各个路口采用的交通信号控制系统的方式也主要有这三种,下面分别进行介绍。
(1)定时控制
定时控制是根据历史交通流数据,人为的预先确定信号机的运行参数。在定时控制中,分为定周期控制与变周期控制。在定周期控制过程中,信号机只有一种控制配时方案,因此信号机全天24个小时只周期的执行这一种运行方案。而在变周期控制过程中,交通警察可以根据当地的实际交通状态,将全天分为多个时间段,并且为每个时间段可以设置为多种不同的运行方案,每天由时钟自动选择、切换运行方案。
(2)车辆感应式控制
在车辆感应式控制方式中,没有固定的周期和绿信比,信号灯的灯色根据交通路口的交通流量的需要变化而变化,控制方式比较灵活。这种控制方式需要使用感应式信号控制机,通过埋设或悬挂在交叉路口的车辆检测器获得车辆信息,然后根据采集到的车辆数据,判断是否延长特定相位的绿灯间隔时间长度,当然也可以跳过没有交通需求的相位。在感应式控制中,它包含三个参数:最小绿灯时间、单位延长绿灯时间和最大绿灯时间;同时车辆感应控制又可分为:半感应控制和全感应控制。
(3)自适应控制
自适应控制方式在计算机技术和通信技术发展到一定水平的情况下产生的。它和车辆感应式控制相似,通过检测器检测到交通流信息,然后将这些数据实时的通过网络传到上位机,上位机实时的产生最佳的绿灯配时方案,并付诸实施,可以使一段时间内车辆放行最大,或者使其它交通控制评价指标如延误、停车次数等最小。这种控制方式适合与区域管理或干线协调时使用,上位机可以对多个路口信号机进行协调,使其运行方案可以根据交通流的变化而自适应的调整,从而提高整个区域或干线上的运行效率。
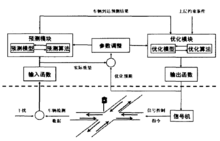
交通信号自适应控制模型该模型包括物理空间模型和信息空问模型两个部分。物理空间模型部分山实时交通数据采集系统、真实交通流动态系统以及信号控制策略执行机构组成。信息空间模型部分由交通流预测模块、信一号策略优化模块以及在线自适应参数调整模块构成。
物理空间模型中的交通数据采集系统包括各种现有的车辆检测设备和技术,随着技术的进步可以逐步添加各种新的检测手段。该系统的功能是对来自不同数据源的交通数据进行融合过滤,形成控制系统可用的实时交通流特性信息。信号控制策略执行机构负责将控制系统输出的优化信号控制策略转变为实际的信号灯控制指令并执行。
系统架构交通信号自适应控制系统的架构包括物理架构和逻辑架构两部分,下面将分别对物理架构和逻辑架构进行介绍。
物理架构
物理架构是指交通信号控制系统各个物理设备的分布以及设备之间如何进行通信等。交通信号自适应控制系统物理架构一般采用三层分布式结构,包括信号控制中心、通信部分和外场部分。
(1)信号控制中心。信号控制中心设备主要包括智能交通信号控制系统软件、中心控制服务器、区域控制服务器、通信服务器、数据库服务器等。
(2)通信部分。通信部分主要包括数据通信控制机和通信网络。
(3)外场部分。外场部分设备主要包括信号机、车辆检测器等,信号机根据车辆检测器所检测的交通信息(包括车流量、速度、排队长度等)调整路日控制方案(信号周期和绿信比),实现路日的有序控制。
中心控制计算机的主要功能是负责监视和协调整个系统的运行,它能够同时控制多个外部设备。中心监控台可以实时地显示城市交通情况,辅助工程师进行控制决策,可以进行人机交互发送指令。动态地图板可以实时地显示路网的交通流状况。信号控制软件执行交通信号控制程序,对信号机进行远程控制。数据通信控制机负责中心控制计算机与路口信号机以及其它外接设备的通信。路口信号机通过与检测器和信号灯相连,可以实时采集交通信息,并将交通信息传送给自控制计算机,并接受中心控制计算机的指令,来控制交通信号灯。室外情报板可以根据实时的交通流状况来发布交通诱导信息。
逻辑架构逻辑架构是指交通信号控制系统内部各个模块之间的组成关系,以及系统提供给外部模块的接口等。逻辑架构应该使得各个模块之间的祸合度尽量低,尽量使得各个模块之间相互独立,要明确各个模块的功能,各个模块之间通过预留的接口进行协调合作,各个模块的输入输出要明确,能够跟外部的其它系统进行集成。
交通信号自使用控制系统的目标是提高交通路网的利用率,改善城市交通状况,缓解交通拥堵。由于针对不同的城市区域以及不同的交通状况,交通控制的目标是不同的,因此本文提出的基于动态优先级的交通信号自适应控制系统采用了多层级的逻辑架构,能够在不同的层级上选择合适的控制目标进行协同控制。
单个交叉口的信号控制是最基本的交通信号控制方式。在路口控制层,通过埋设的各种检测器实时获取真实的交通流数据,根据采集的真实交通流数据来进行优化配时,给出信号配时方案,从而控制路口的交通信号灯。在路口控制层,我们需要根据车辆的到达信息来调整信号控制方案,使得信号控制方案能够符合交通流的变化。
单个交叉口的交通信号控制只是针对一个交叉口进行独立的信号控制,它没有考虑到相邻路口之间信号控制的影响,比如说没有考虑当前路口绿灯会对下游路口造成什么样的影响。因为我国城市道路上相邻的交叉日之间的距离相对比较短,如果不考虑相邻交叉口之间的相互影响,而只是对单个交叉日进行独立的信号控制是不合理的,甚至会造成整个路网的交通性能下降,单个交叉日的信号控制只能使得路网的局部达到最优的效果,并不能使得整个路网的交通性能最优。因此,交通信号控制系统需要考虑到路网的整体交通状况,对路网中某一区域内的信号控制进行协同,从而提高路网整体的性能,提高路网吞吐量。在区域控制层,我们需要考虑整个区域内的交通流状况,给出交叉口之间信号控制的协调方案,保证整个区域的交通畅通,此时不再是根据单个交叉口的交通流做出优化配时,而是根据区域内所有交叉口的交通流信息进行协调优化,使得信号配时能够适应交通流的变化。1
存在的问题交通流预测中的不确定性
自适应交通控制策略主要依赖于到达交通流的预测。这里有两种预测。一种是基于测量到的实时数据,来预测检测到车辆的移动,另一种是基于历史数据来预测未来的车流。前一种称为估计,后一种称为预测。长期优化是为了达到全局最优,基于实时数据的控制依赖于许多短期优化来减少交通需求中的不确定性,并提高计算的准确性。比如,RHODES中使用的COF算法根据上游检测器位置每隔30到40秒来优化相位顺序。OPAC策略基于过去的50到100秒,所以他的有效性依赖于交通流预测的精确性。不论交通信息是如何获得的,预测和实际数据间必然会有一定差距。所以,一个理想的自适应控制策略应该尽可能减少对预测的依赖。
旅行时间估计的困难
一个可靠的估计模型必须能够为自适应控制提供可靠的实时交通信息。车辆到达信息通常通过在上游路日设置的检测器获取,而估计得目标是获取_卜游检测器到路口停车线的车辆旅行时间。对于系统优化来说,理想的情况是估计一段较长时间的交通情况,但是由于地理的限制和车辆到达的不确定性,在估计时间和真实数据之间总是会有误差。
缺少自调节机制
自适应控制策略的有效性同样依赖于一些系统参数的合理估计,包括队列形成和消散,启动延误,车辆消散率。启动延误和车辆消散率会受到很多因素的影响,比如道路施工、交通事故甚至天气原因等等。这些差距在模型使用静态参数时无法体现出来,然后积累的错误会导致足够大的系统偏差。事实上,大部分现有的自适应控策略没有自调节的功能。2

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国