

由欧盟出资250万英镑进行各种研究和设计。投放在泰晤士河中的机器鱼是科学家们完全按照仿生学原理设计的,体长约50厘米,高15厘米,宽12厘米。这些机器鱼可以自动监测河水中的各种污染物,并利用GPS装置将数据适时传给研究人员。投放在泰晤士河中的所有机器鱼都具备协同工作的能力,即使没有科学家的控制,它们也能根据此前设定的程序协同合作。当一条机器鱼“嗅出”一片水域中的有害物质时,它们就通过wi-fi无线连接彼此交流数据,然后适时向研究人员和环保部门发出警报。

机器鱼是科学家们根据仿生学原理设计制造的,它们游动起来酷似真正的鲤鱼,身体在发动机的推动下来回摆动,并用鳍和尾来改变它们的游动方向,其游动速度可望达每秒半米。此机器鱼先遣队将在18个月内真正去水里进行污染探测,最初会去港口监测大型船只的泄露和排放,还可能去查一下泰晤士河的污染情况。
埃塞克斯大学的研究人员表示,“泰晤士的污染状况正在不断恶化,如果不能确定河水中污染物的方位,污染物泄漏无疑将随着时间推移而变得愈发严重。希望通过这么做(投放机器鱼)可以防止向海中排放具有潜在危险的物质。” 如果实验成功,科学家希望这种机器鱼在全球各地得到使用,以阻止污染蔓延。
它们将分别配备不同的传感器来探测不同的污染物,之后科学家再用这些数据绘制实时的水污染3D图,好让环保部门采取最好办法来清除这里的污染物。科学家表示,他们会让这些机器鱼充电一次就能在水中持续游动24小时。
美国华盛顿大学的研究人员已经成功地研制出三条机器鱼,在水中游泳时可互相交流。该机器鱼,就像真鱼一样,依靠鳍游泳。机器鱼还能追逐猎物,如漂流物或小鱼。机器鱼的后部有两片平行于水面的尾舵,随着尾舵转动,机器鱼可以上浮和下潜。还有一条竖直的尾鳍,用来保证平稳。机器鱼唯一的动力来自尾巴。这片尾巴,由后部伸出的一只机械臂带动。机器鱼模仿的是鲑鱼的动作。鲑鱼的划水动作看似简单,其实科学家需要利用专门的仿生学研究其轨迹,得出相应的算法,好指挥机械尾巴运动,做到尽量平滑。
研究历史早在19 世纪20 年代就有学者开始了对鱼类游动机理的研究,在60、70 年代达到了一个高潮。
1959 年,Taylor 采用“静态流体理论”通过准静态逼近的方法建立了一种“抗力水动力学模型”来分析、计算流体力。这种方法由于忽略了惯性力,以及对鱼体和尾鳍运动及鱼身体形状的过分简化,只适用于雷诺数比较低的情况。
1960 年,Lightill 首次基于“小振幅位势理论”建立了分析鱼类鲹科推进模式的数学模型[3],这是鱼类推进模式研究历史上第一个关于鲹科推进模式的数学模型。
1961 年,Wu 首次提出了“二维波动板理论”。该理论中将鱼当作一弹性薄板,这是一个比较实际的用于分析鲹科模式的水动力学理论。该理论与空气动力学的“细长体理论”一起成为1970 年Lightill 提出的用于分析鲹科推进模式的“细长体理论”的基础。
1969 年,Schere 研制了一种尾鳍摆动式水下推进器,尾鳍是展弦比为3 的刚性平板,其研究结果表明与常规螺旋桨推进器相比,该尾鳍摆动式水下推进器具有更高的推进效率和推进力。
1970 年,Lightill 首次将空气动力学中的“细长体理论”用于鲹科推进模式的水动力学分析。[6]在该理论中,由于身体波动引起的水流在一个尾鳍摆动循环中被认为可以忽略,通过尾鳍后缘动力学计算了平均推进力。该理论很适合鲹科推进模式的理论分析,但并不适于鲹科加新月形尾鳍推进模式的分析。
1971 年,Lightill 首次考虑了尾鳍任意摆幅的运动,提出了“大摆幅细长体理论”,在该理论中尾鳍的侧向位移非常大,比“细长体理论”更适合用于鲹科模式的水动力学分析。
1975 年,Webb 通过实验研究,得出了鲹科推进模式的推进效率可达80%。
1976 年和1977 年,英国剑桥大学应用数学和理论物理系的M.G.Chopra 和T.Kambe 等人研究了鱼类鲹科加新月形尾鳍推进模式的水动力学特性。该研究考虑了具有弧形前缘和尖锐后缘的有限薄板的小摆幅平动和俯仰运动,是对Chopra1974 年提出的矩形模型的推广。讨论了具有最佳推进力和推进效率的尾鳍形状。研究发现,与矩形尾鳍相比,具有新月形弧形前缘的尾鳍,后掠角超过30时,推进效率显著降低。
1977 年,M. G. Chopra 和T. Kambe 又提出了一种可用于大摆幅、新月形尾鳍推进系统的“二维抗力理论”,该理论是1953 年Hancock 提出的“大摆幅抗力理论”和1971 年Lightill 提出的“大摆幅细长体理论”的补充。在其理论中考虑了尾鳍的摆动和平动运动,分析了任意摆幅的规则或不规则的运动,推进力的表达式,维持运动所需的推进器功率,传递给尾流的能量,并且认为流体力学效率是斯德鲁哈尔数、摆动轨迹的幅值以及尾鳍击水角度的函数。
1978 年,以色列技术学院航空工程系的J. Katz 和D. Weihs 等人进行了在弦长方向上为弹性的、大摆幅运动的水翼推进系统的流体力学特性的分析研究,研究分析了柔性翼在理想不可压缩流体中以大摆幅、曲线摆动时的推进力。重点研究了翼在弦长方向上的弹性对大摆幅水翼推进系统的影响,研究结果认为与作相同运动的刚性翼相比,柔性翼可以使推进效率提高20%,而推进力降低不大。
1978 年,日本东京大学物理系的T. Kambe 分析了鲹科推进模式游动运动的水动力学特性。
1979 年,美国堪萨斯大学的C. E. Lan 提出了一种计算推进力和推进力效率的“准涡流栅”方法。
1994 年,日本Ikuo Yamamoto 等人研制了摆动时水翼水下推进器,通过水翼的运动来模拟鲹科加新月形推进模式中尾鳍的运动。该水翼做平动和摆动的复合运动,研究了尾翼刚度对推进速度和效率的影响,并且将神经网络用于控制系统的设计当中,进行了实验研究。通过测试验证了尾鳍摆动式水下推进器的高效率,并且得到了与螺旋桨等常规推进器相比很多的优点。
1994 年,美国麻省理工学院的R. Gopalkrishnan,M. S. Triantafyllou 等人提出了对尾鳍摆动时产生的尾流进行主动控制的思想。尾鳍摆动时产生的尾流是一系列方向交错排列、离散的漩涡,他们认为,尾鳍摆动时从尾流中回收了能量,而这正是采用鲹科加新月形尾鳍模式推进鱼类推进效率高的主要因素之一。
1994 年,美国麻省理工学院的研究人员通过长时间的观察金枪鱼的游动情况,研制成功了世界上第一条真正意义上的仿生机器金枪鱼(RoboTuna)。该机器鱼是一条长约1.2 米,由2843 个零件组成的,具有高级推进系统的机器金枪鱼。它具有关节式铝合金脊柱、真空聚苯乙烯肋骨、网状泡沫组织、并用聚氨基甲酸酯弹性纤维表皮包裹,它装有多台2 马力的无刷直流伺服电动机(实际上只使用每台电机额定功率的十分之一)、轴承及电路等。机器鱼在多处理器控制下,通过摆动躯体和尾鳍,能像真鱼一样游动,速度可达2m/s。机器鱼的摆动式尾鳍有助于机器鱼的推进,可使推进系统的效率增加一倍。
1995 年,机器鱼“Pike”在美国麻省理工学院诞生。机器鱼“Pike”的硬件系统主要有以下几部分构成:头部、胸鳍、尾鳍、背鳍、主体伺服系统、胸鳍伺服系统以及电池等。
1999 年,日本的M. Nakashima,K.Tokuo 等人研制了一条自主驱动的具有两个关节的自推进的机器海豚,该机器海豚是高速游动海洋生物海豚的简化模型,长1.75米,与实际海豚的尺寸非常接近。该机器海豚由流线形身体和矩形尾鳍构成,第一个关节由空气马达驱动,第二个关节由弹簧驱动,结构图如图1-3。研制了测量第一个关节转矩和转角的测量系统,该机器海豚的推进速度可达1.2m/s,推进效率约为35%。
1999 年,美国麻省理工学院海洋工程系的D. Sbrrett 和M. S. 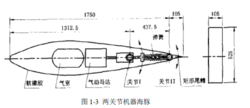 Triantafyllou 等人通过实验测量了鱼形体在水中游动时所受到的阻力以及维持运动所需的推进器功率。该实验中,游动体为一条长1.2m,由柔性皮肤包裹,并且装有一新月形尾鳍的机器鱼。实验中流体的雷诺数Re=106,并且外加扰动。机器鱼身体的侧向运动模式为一列波幅随鱼体长度变化的行波。实验结果表明阻力的降低对斯德鲁哈尔数、身体波的摆幅、波长以及尾鳍击水角度十分敏感。完成实验所必须具备的条件是身体波必须大于鱼游动速度。另外,他们认为尾鳍的摆动从尾流中回收了能量,所以具有很高的效率1。
Triantafyllou 等人通过实验测量了鱼形体在水中游动时所受到的阻力以及维持运动所需的推进器功率。该实验中,游动体为一条长1.2m,由柔性皮肤包裹,并且装有一新月形尾鳍的机器鱼。实验中流体的雷诺数Re=106,并且外加扰动。机器鱼身体的侧向运动模式为一列波幅随鱼体长度变化的行波。实验结果表明阻力的降低对斯德鲁哈尔数、身体波的摆幅、波长以及尾鳍击水角度十分敏感。完成实验所必须具备的条件是身体波必须大于鱼游动速度。另外,他们认为尾鳍的摆动从尾流中回收了能量,所以具有很高的效率1。
随着陆地资源日益枯竭,人们把目光投向了拥有丰富资源和巨大开发价值的海洋,这使得水下作业任务发生了很大变化,提出了许多新的要求,原有的水下检测、作业、运载装置难以满足复杂水下作业任务的需求,加速了水下机器人的研发工作。鱼类,作为自然界最早出现的脊椎动物,经过亿万年的自然选择,进化出了非凡的水中运动能力,鱼类的游泳技巧远高于人类现有的航海科技。和普通的水下推进器相比,鱼类的游动具有推进效率高、机动性能好、隐蔽性能好等优点。仿生机器鱼作为鱼类推进机理和机器人技术的结合点,为研制新型的水下航行器提供了一种新思路,具有重要的研究价值和应用前景。一旦步入应用,仿生机器鱼将在复杂危险水下环境作业、军事侦察、水下救捞、海洋生物观察、考古等方面发挥重要作用2。
特点仿生机器鱼是属于仿生机器人学的范畴,因此它涉及到机电、材料、流体力学、控制、能源、生物、通讯等学科。对它的研究可以带动相关学科的发展,同时由鱼类运动的特点还决定了仿生机器鱼在一些特殊的领域具有不可替代的作用,同常规水下运动设备相比,仿生机器鱼具有以下特点:
Ⅰ 推进效率高:鱼类的高效率与其完善的流体性能有关。鱼类通过尾鳍的摆动能消除螺旋桨产生的与推进方向垂直的涡流,产生与推进方向一致的涡流,并且整理尾流,使其具有更加理想的流体力学性能,从而提高效率。初步试验表明机器鱼的推进效率比常规水下设备高30%以上。采用机器鱼作为水下机械可大大节省能量,提高能源利用效率,从而提高了水下作业时间和作业范围。同时相对于目前的船舶,其高的推进效率可以节约大量的能源,在研究仿生机器鱼推进机理的基础上可以为新型船舶的设计提供新的思路。
Ⅱ 机动性能好:机器鱼具有高速启动、加速的性能,以及可在小范围内实现不减速转向运动。研究发现,生活在水中的依靠敏捷运动才能生存的鱼类,可以不减速实现转向运动,并且其转向半径只有其身体长度的10%~30%。而现在的机动船在转向时其速度要降低50%以上,并且其转向半径大。由于采用身体波动式推进的机器鱼体型细长,并且具有足够的柔韧性,使其在空间狭窄、空间结构复杂的场所有着更良好的机动性能。因此它可以在波涛汹涌、地势险峻的海洋环境中进行水下探测和水下作业。
Ⅲ 噪音低、隐蔽性能高:军事应用方面,由于机器鱼在雷达上的表现形式与生物鱼类几乎相同,能够轻而易举地躲过声纳的探测和鱼雷的袭击,出其不意的攻击对方舰艇、基地,具有重大的军事应用前景。而且在民用上,可以用于海洋生物观察。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国