

运用手段及原理雷达
微波雷达系统是构成主动遥感最重要的方法手段。采用电磁振荡器发生特有的频率即可变成发射的传输信号,微波束的发射和聚焦技术采用已很成熟的多极天线,即可在观察的任一目标的方向上实现聚射。微波信号可在任何天气条件下具有良好的连续贯穿空气的性能。它可做为专用载波调制技术,在传输中保持调制特性并易识别那些被观察目标反射时的噪音与失真变形。此外,在反射波频率变化时利用微波可预测和观察目标移动速度。这是众所熟知的多普勒效应。2
雷达用在航空跟踪已是人们很熟悉的了。利用旋转天线辐射某些固定频率电波的规定脉冲串,电子束在目的域内从一边到另一边旋转覆盖扫描,如果,脉冲触及到某一目标时则产生反射信号被接收天线接受。从天线到方位物或目标的距离可依脉冲到达目标后返回的时间断定,其方向可由接收返回信号时的天线指向得知。由于波的往返速度很高,在脉冲往返期间天线回转量很小并可忽略。已知它的距离和方向,目标的位置即可由荧光屏(CRT)上自动显示出来的反射信号来确定。即使用较慢的手算也可同样完成,在天线回转观察的期间内目标游动的方向、速度以及相继的位置和消逝的时间都是可确定的。换句话说,从天线发射方向,特别是直接向前或向后移动(换向)时多普勒测量可更加精确。2
目标尺寸规模的判断也可依反射的能量值确定,但要考虑到方位物的反射强度随距离增大而衰减并与移动距离的平方成反比的这种实际情况。
近代雷达技术用来判断降雨。波长在厘米范围的波段利用微波信号的反射测定局部降雨。降雨量和它的密集浓度以及其距离也像航空跟踪天线那样全方位的跟踪连续记录。但是,要辨认返回的信号有点困难,因为从降雨区域的边沿到最远处的距离有延续的时间周期,它是可依返回信号的幅度累加并以加权因子系数减去距离确定某方向到来的总雨量,依返回的持续脉冲串时间可绘制降雨面积图。2
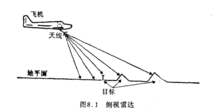
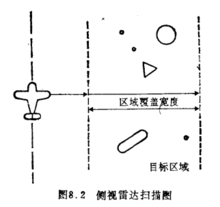
雷达有各种不同的使用方法。用侧视雷达技术从空中绘制的地形图,表示在图8.1中。由飞机载带的天线设计成向前方发射扇状微波脉冲,在飞机通过地域的地平面直线上, 目标系列垂直的反射到飞机的天线上。因每个目标与飞机距离不同,因而获得返回的信号时间也不同。处理返回的信号系列,将允许识别线上的各个目标。当飞机向前飞行时,微波信号的扇面扫过位于该地域中的目标(图8.2)。这样,允许返回的信号绘制全面积的二维图形。
虽然,侧视雷达用于许多目的,而用于绘制地图是其特别重要的原故。飞机前方的地形斜坡和地面地貌反射到天线上的信号率要比它离开斜坡时要高(见图8.1)。因此,一个斜坡在图板上显示成亮域,而另一个则为暗域。从而侧视雷达提供了快速,简单地绘制大面积,包括重要的等高线地形图。
两个转动的侧视雷达天线,水平向尺寸要比垂直向长些。这使水平向达到较高的聚束,使得电子束有个明显的方向,输出的扇孤超过垂直向。这样,在相同平面上可观测多个目标。正如前面已阐述的那样,达到集束,但天线的尺寸必须比探测方位物波长大许多。
地震波在地质和矿物探测方面通常采用地震波主动遥测法实现。冲击波是由钻进地下一定深度的孔内放置硝化甘油火药包的爆炸而产生的,用一系列地震探测器测量反射波(图8.3)。这种反射发生在不同地质结构的边界层之间,如土地与地下岩石之间或保持水平的油和水。依边界层状态和探测器相关的位置,在不同的时间里反射到达探测器。
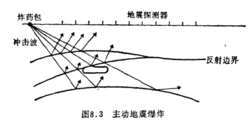
由一组探测器接收和分析的反响以及冲击波反射到达的时间,可提供很好的深度及地质成分的概念。后者由于密度和地震波速度的差异则可进行判断。
正像前面曾阐述的那样,地震的级数是依地震扰动监视地球震动的振幅和方向。包括迟后相列差和每个地震通道记录不同迟后值在内,由阵列线上相关连的特别方向到来增大的信号累加成阵列信号。这是因每个通道各自的迟后与每个测震仪组阵列方向和位置相互关连着。调正迟后时间周期,注意所设置的值增到最大信号,即可确定地震扰动的方向。2
声纳在水中声反射波的方向如同空气和空间里插入的低频压缩波(频率范围——高频可达数百千赫)干扰介质。它与雷达技术相类似,但这种方法在不同的声波起源点称为声纳。先进有效的声纳波在微波范围内衰减较小, 当微波在水中通过时很快消散。微波通常是用薄石英片或其它材料在电场中的快速交变晶体振荡器产生。在电场内由于材料伸缩强度的变化而导致高音频率的发生。它可以使这些波聚焦作为反射器。但这需要高能量束流,采用单独的振荡器排成阵列组,并输给全部阵列组中的振荡器相同电流,各个振荡器定向地放射声波,总合的方向放射是很强的,放射是沿垂直阵列振荡器的方向定向相加,但其它方向趋于消除。这类似多极雷达波阵列天线的聚焦能力。2
在船和潜艇上使用声纳航行,类似雷达;因机械振动应用是很广泛地,它的响应仅能在很强的共振时才能识别。声纳工作应用范围比航空导航雷达要小,但单个声纳接受乱比微波系统成本低。使用一组独立天线和检波器有可能记录接收来自各方位的波(微波接收天线通常仅由一个检波器集中接收进入波)。这能使许多复合信息实现摘录处理,以及曾在前面阐述的类似地震系列信号处理系统。现今发展已投入使用的声纳可绘制的水下结构图形表示在图8.4中。
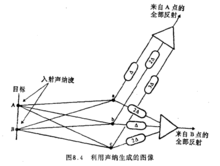
这里是由阵列微音器组记录的目标反射声波。图中展示的是三个微音器。从话筒获得的电信号各自受到一个给定相位的延迟△,然后相加。相位延迟与传输路程的长度有关,依从B点反射来的信号而论,对路程Ba及Bc比更直接的路程Bb需要一个较长的延迟,以便使所有三个检测器的反射信号在相位上是重叠的。从目标中的其它区域反射的信号也将有不同的重叠,因为我们已经假定延迟仅仅适合于B点。总的说来,从所有其它点到达的信号都会趋向于相加到零,并对累加的总数几乎没有什么影响。如果我们考虑适当地增加其它点A,那么,由于有不同的传输路程的长度,对三种通道需要一组完全不同的延迟。在实际情况下,许多的话筒将会被排列成直线的或矩阵式的系统应用。相位迟后与矩阵组排列涉及到全部微音器为每个目标象素输出总和的最大频响,并平行载出,在这种情况下,我们能够在普通光照射的地方为目标用声波提供“照射”。这个系统的原理近似透镜或望远镜,它们可将沿不同方向来的每束光聚集在呈像板的各自不同的点上,换句话说,用一组编制的延迟程序,依次对每一目标图像所给定的输出端进行一系列的操作,像由迟后校正值有效地检测图像一样。另一方面,平行处理可用模拟法实现,也可用数字化法实现,顺次的连续处理则要求计算机或微型计算机按迟后时序调正控制效果。2
激光到目前为止,有些可见光用于主动遥测,由于它需要很大的能量光源和附加光,致使很难从接收的信号中析取反射。激光源是克服这些问题最显著的有效方法,普通的白光被称为“不相干”光,那就是,它的能量是全方向的散布和有很宽的频率带。而且,它析出的频率成分不在同一相位,事实上,它显示的特性很像电讯系统内的噪音,称为“白噪声”。它这种混乱传输特性被广泛的用做绘图。为了产生有效能的窄光束,需要很庞大的反射聚光抛物镜,使这光成为“平行”。激光束的重要特性是它能产生平行光束,组成规则连续的单一频率波和恒定振幅。因此,激光系统能放射高聚焦和极大密度的窄光束,低的频率和相同的相位。这意味着我们能用窄频带滤波消除其它频率实现接收。这样,干扰总量可大大减小,并允许很小的反射检波。2
全部信号记录处理,可用被动遥感实现,但是,研制多通道,要在几个不同频率下生成数个不同激光中的任一个或生成更经济可调谐的激光时,它的光频率放射应是可变的。接收器要适合频率特性的滤波。任一带通的宽频响应足以覆盖全部可调谐的激光频率范围。或者在激光辐射频率节距变化时是窄带通和是可调的中心频率。
自从光源被用以照射目标和观察以来,已不只限于日光期观察了。频率的选择特别适合给定的要求。例如,在试验中的红宝石激光器用于监控大气中的水蒸气含量,观测在该频率下水分子粒子消散效应。另一个应用可行的激光技术是通过多普勒效应测量目标速度,但它仅能在一个特殊频率下产生光的反射才能使用。2
微波主动遥感星载微波主动遥感主要包括散射计、海面高度计、雷达、合成孔径雷达(SAR)、干涉SAR(INSAR)等。1978年Seasat载有单一频率的散射计(14.6 GHz)和SAR(L波段,hh极化,25m空间分辨率),1991年与1994年开始的欧洲ERS-1,2上载有散射计(5.3GHz,vv极化,空间分辨率45km)、雷达高度计(13.8GHz,分辨率16~20km)。1997年开始的TRMM载有Ku波段降雨雷达,与被动遥感的辐射计一起主要探测雨强、降水分布等。3
特别重要的是20世纪90年代以来的极化SAR高分辨率成像技术在遥感应用中的广泛开展。如:1994年进行的航天飞机SIR-C/X-SAR多通道(L、C、X波段)全极化SAR观测,图1-4给出三通道极化合成的美国纽约的SAR观测图像。利用多频段、多极化SAR观测获取地表特征信息与分类是目前SAR遥感信息研究的重点。在SIR-C之后,有欧洲空问局(ESA)ERS-1、2 SAR(5.3GHz,vv极化),2002年3月ESA的Envisat-1 ASAR(Advanced SAR,C波段、vv,hh极化,空间分辨率30m),日本JERS SAR(1.275GHz,hh极化,35.21。入射角,18m空间分辨率),加拿大Radarsat-1 SAR(C波段5.3GHz、hh极化、8m空间分辨率),以及2006年的Radarsat-2全极化SAR(C波段、3m分辨率)等。也有不少机载SAR的研究任务,如美国JPL的全极化AirSAR(P、L、C、X波段),欧洲EmiSAR(全极化,L、C波段)等。通过多通道(频率、极化)的合成,来获取与处理信息。3
利用SAR两次相干观测的相位信息提取地表三维信息(地面高程、地面形变等),形成了干涉SAR(INSAR)技术,极大地拓展了机载与星载SAR的应用领域,比如2000年2月美国NASA的航天飞机雷达地形测绘任务(SRTM,Shuttle Radar Topography Mission,C、X波段),在Radarsat-2中也将充分考虑INSAR应用。
雷达与SAR对于大气降雨、大气可降水量、云中液态水含量,海面风场、台风、海冰的监测,陆地土壤湿度、积雪、干旱洪涝灾害、陆地水文、植被与农作物生长监测等都有重要的应用。同时,还可在土地利用、地质资源与探矿、地下目标探测、大地河口与海岸监测、城市发展管理、海流与海面污染、海面舰船或地面目标的识别等民用和国防技术中有十分重要的关键性的应用。全极化SAR与INSAR图像还可以用来反演森林树木高度、地面数字高程、地面形变、各类地表的分类等。此外,逆合成孔径雷达ISAR、双站BiSAR等研究也正引起关注。3
我国在神舟4号多模态微波遥感器中包括了辐射计、散射计与高度计的科学实验,海洋2号卫星将载有微波散射计和高度计等。在机载和星载SAR的研制上也正取得重要进展,机载SAR已取得十分良好的空间分辨率图像,全极化SAR的研制也在进行中。
高分辨率的主动微波遥感对于地表目标形状等物理特征及其同极化和交叉散射十分敏感。如何从多通道(频率、极化等)主被动遥感数据图像中提取和处理定量科学信息,完成从数据到信息、信息到知识的转化是遥感信息科学的本质任务。3
应用实例气象雷达——主动遥感探测
一般地面和高空探测的探测方法,都需要仪器的感应部分和大气直接接触。这给气象探测造成了很大限制。能不能有不必和大气直接接触而从远处探测大气的呢?有的。这就是20世纪中期发展起来的遥感探测。其中气象部门最大量使用的,便是气象雷达。4
雷达是1935年英国科学家瓦特(发明蒸气机的瓦特的孙子)发明的。雷达探测的原理是,从雷达天线定向发射出的脉冲无线电波在碰到目标物体时,就有一部分电波散射返回。回波被雷达接收机接收后,目标物便能在屏幕上显示出来。根据发射波束的指向可以确定目标物的方向,根据接收到回波的时间可以确定目标物的距离。
在第二次世界大战以前,雷达主要用于军事目的,例如雷达可以发现敌方飞机入侵。可是,每当天上有云或有降雨的时候,雷达发射的电波首先被云雨散射,使雷达屏幕上的军事目标不清楚以至不出现。这就是云雨对军事雷达探测目标的干扰。1941年2月20日,一部美国的10厘米波长的军用雷达,在执行探测任务时,在屏幕上发现距离海岸7海里(1海里=1.852公里)处的海上有很强的回波讯号。但弄不清楚这是怎么回事。经过气象学家证实,这是大气中降水雨滴造成的回波。就这样,歪打正着,雷达开始被用来探测云雨。雷达回波越强,表明云中的水滴越大越多,暴雨的强度也越强。4
据记载,专门制造出雷达来探测大气云雨风暴的是美国,时间在1943年。
气象雷达所使用的无线电波长范围很宽,从1厘米以下到1000厘米都有。气象雷达的性能决定于它使用的无线电波波长。一般常用K波段(波长0.75~2.4厘米)探测不产生降雨的云(因此称为测云雷达),用X(2.4~3.75厘米)、C(3.75~7.5厘米)和S波段(7.5~15厘米)探测暴雨和冰雹(因此称为测雨雷达)等等。4
激光主动遥感发展趋势(1)进一步借鉴微波雷达遥感的概念、方法
相对于激光雷达而言, 微波雷达的发展更成熟、使用面更广, 因此, 微波雷达的概念、信号处理的方法对激光雷达的发展具有借鉴作用, 如相控阵、合成孔径等概念就直接取之于微波雷达;连续波调频和脉冲压缩等信号调制及解调的方法正在被激光雷达所采用;甚至在海洋激光雷达中, 发射时将微波信号加载到激光上, 接收到回波后在通过光电器件变成微波信号加以处理。总之, 未来微波雷达的技术和思路将进一步渗透到激光遥感领域。5
(2)与其他遥感手段的配合、融合, 发挥遥感系统的综合优势
激光主动遥感与微波遥感、红外遥感之间相比各有优势, 微波波束的发散角大, 激光发散角小, 因此, 激光的精度和角分辨率高, 而微波的搜索能力强;微波雷达的电磁干扰敏感, 探测地空目标时, 回波信号就被地面的杂波所淹没, 激光雷达电磁抗干扰能力强, 它们之间存在着互补性。激光高度计就和微波SAR合在一起用 ;未来的预警系统倾向于激光主动遥感和红外系统组合使用, 先用红外系统大面积搜索, 一旦发现可疑目标则通知激光雷达跟踪、测速、测距, 如夜晚没有光源照明, 热红外成像不能将目标和环境区分开来, 如果和激光主动遥感相配合则可以很好地解决这一问题。5
(3)新技术和新器件不断面世, 将不断改善激光雷达的性能
在激光雷达领域, 许多新技术在不断出现和进步, 如光纤激光器功率的提高, 阵列半导体激光器性能的提高, 激光稳频技术的改进;InGaAs和HgCdTe雪崩二极管阵列的研制成功等;分辨率更高的滤光片和分光器件的使用等将不同程度地改善激光雷达的性能;还有光子计数和距离门等技术都会对激光雷达的发展产生重大影响。5
(4)单台遥感设备功能综合化
激光雷达单台设备只测一个参数的情况在将来会越来越少, 往往是共用光源与光学系统, 尽量从散射和反射回波中获得更多信息, 形成带有一定综合性的遥感设备。2001 年发射的ICESAT 卫星上的GLAS 激光雷达, 是NASA 测量海冰而设计的主动传感器, 主要测量两极地区的冰层, 建立高精度的陆地数字高程, 同时获得全球尺度的云和气溶胶的垂直剖面, 还能进行海表和海洋次表层测量。设想中的导弹预警系统, 激光雷达跟踪目标的同时, 不断测距和多普勒测速;2005年德国科学家Andreas等提出四维综合性激光大气雷达, 同时用M ie散射测气溶胶、Rotational Raman散射测温度以及差分吸收测水汽。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国