

构成
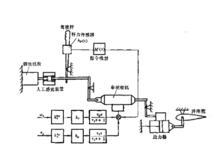
控制增稳系统能够提高飞机稳定性又能改善操纵系统的飞行控制系统。飞机的稳定性是由气动布局决定的。现代高速飞机的稳定性与操纵性相互矛盾。应用控制系统的机理,引入飞机的角速度和过载信号形成闭环控制,以提高飞机的稳定性;引入前馈指令复合控制,以改善飞机的操纵性能。控制增稳系统是电传操纵系统的基础,已被广泛地应用到现代飞行控制系统中。其纵向控制方框图如图所示。
控制参数主增益系数的选择
作为主通道的增益系数K 的增大, 可以提高飞机的抗干扰能力,同时提高飞机对驾驶员指令的反应能力。但是K 的增大, 使短周期频率增长较快,K 过大会使系统出现发散趋势。因此K 不宜取得过大。
反馈参数的选择
本文反馈参数N的影响, 是基于另一个反馈参数保持不变的基础上,因此增大N 对于提高飞机的短周期频率有较大的作用,同时可改善机动飞行中的杆力对过载梯度和杆位移对过载梯度, 提高飞机对驾驶员指令的反应能力。
前馈放大系数的选择
设置前馈放大系数,是专为提高飞机的操纵性而设计的, 相当于系统中的控制环节。选取较大的M,对改善飞机的杆力对过载梯度和杆位移对过载梯度, 提高飞机对驾驶员指令的反应能力均有较好的效果。但是较大的M会使系统的高频振荡分量增强,对于飞行品质是不利的因素1。
优点1、能较好地解决了飞机稳定性与操作性之间的矛盾,克服了增稳操纵系统的所有缺点。
2、能有实现杆指令与飞机响应之间的任何静动态关系,也能实现驾驶杆的任何启动力要求。
3、这种系统中的机械杆系可设计的简单一些,只要保证飞行安全即可。
4、由于驾驶员的操纵信号可通过两个通道传输至舵面。这样在系统设计和调整中提供了操纵信号分配的灵活性。考虑到理想的操纵系统特性,不依赖于机械杆系本身的特性,通常只要改变电气部件的增益和时间常数,能容易地变化操纵系统的特性。
5、为提高飞机机动性、放宽静稳定度要求、设计新型的高性能飞机提供了可靠性2。

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国