

简介
行走机构是行走式机器人的重要执行部件,它由行走驱动装置、传动机构、位置检测元件、传感器、电缆及管路等组成。行走机构一方面支承机器人的机身、臂部和手部,因而必须具有足够的刚度和稳定性;另一方面,还需根据作业任务的要求,实现机器人在更广阔的空间内的运动。
行走机构按其运动轨迹可分为固定轨迹式和无固定轨迹式两类。固定轨迹式行走机构主要用于工业机器人,如横梁式机器人。无固定轨迹式行走机构根据其结构特点分为轮式行走机构、履带式行走机构和关节式行走机构等。在行走过程中,前两种行走机构与地面连续接触,其形态为运行车式,应用较多,一般用于野外、较大型作业场合,也比较成熟;后一种与地面为间断接触,为动物的腿脚式,该类机构正在发展和完善中。
特点行走机构根据其结构分为车轮式、履带式、步行式和其他方式。以下分别论述各行走机构的特点。
车轮式行走机构车轮式行走机构具有移动平稳、能耗小,以及容易控制移动速度和方向等优点,因此得到了普遍的应用,但这些优点只有在平坦的地面上才能发挥出来。目前应用的车轮式行走机构主要为三轮式或四轮式。
三轮式行走机构具有最基本的稳定性,其主要问题是如何实现移动方向的控制。典型车轮的配置方法是一个前轮、两个后轮,前轮作为操纵舵,用来改变方向,后轮用来驱动;另一种是用后两轮独立驱动,另一个轮仅起支承作用,并靠两轮的转速差或转向来改变移动方向,从而实现整体灵活的、小范围的移动。不过,要做较长距离的直线移动时,两驱动轮的直径差会影响前进的方向。
四轮式行走机构也是一种应用广泛的行走机构,其基本原理类似于三轮式行走机构。下图所示为四轮式行走机构。其中图a、图b所示机构采用了两个驱动轮和两个自位轮(图a中后面两轮和图b中左、右两轮是驱动轮);图c所示是和汽车行走方式相同的移动机构,为转向采用了四连杆机构,回转中心大致在后轮车轴的延长线上;图d所示机构可以独立地进行左、右转向,因而可以提高回转精度;图e所示机构的全部轮子都可以进行转向,能够减小转弯半径。
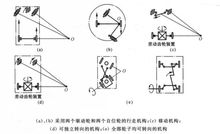
在四轮式行走机构中,自位轮可沿其回转轴回转,直至转到要求的方向上为止,这期间驱动轮产生滑动,因而很难求出正确的移动量。另外,用转向机构改变运动方向时,在静止状态下行走机构会产生很大的阻力。
履带式行走机构履带式行走机构的特点很突出,采用该类行走机构的机器人可以在凸凹不平的地面上行走,也可以跨越障碍物、爬不太高的台阶等。一般类似于坦克的履带式机器人,由于没有自位轮和转向机构,要转弯时只能靠左、右两个履带的速度差,所以不仅在横向,而且在前进方向上也会产生滑动,转弯阻力大,不能准确地确定回转半径。
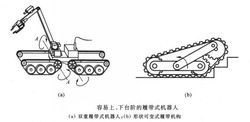
下图a所示是主体前、后装有转向器的履带式机器人,它没有上述的缺点,可以上、下台阶。它具有提起机构,该机构可以使转向器绕着图中的A-A轴旋转,这使得机器人上、下台阶非常顺利,能实现诸如用折叠方式向高处伸臂、在斜面上保持主体水平等
各种各样的姿势。下图b所示机器人的履带形状可为适应台阶形状而改变,也比一般履带式机器人的动作更为自如。
步行机构类似于动物那样,利用脚部关节机构、用步行方式实现移动的机构,称为步行机构。采用步行机构的步行机器人,能够在凸凹不平的地上行走、跨越沟壑,还可以上、下台阶,因而具有广泛的适应性。但控制上有相当的难度,完全实现上述要求的实际例子很少。步行机构有两足、三足、四足、六足、八足等形式,其中两足步行机构具有最好的适应性,也最接近人类,故又称为类人双足行走机构。
1.两足步行机构
两足步行机构是多自由度的控制系统,是现代控制理论很好的应用对象。这种机构结构简单,但其静、动行走性能及稳定性和高速运动性能都较难实现。
如下图所示,两足步行机构是一空间连杆机构。在行走过程中,行走机构始终满足静力学的静平衡条件,也就是机器人的重心始终落在支持地面的一脚上。这种行走方式称为静止步态行走。
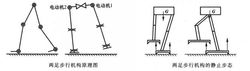
两足步行机器人的动步行有效地利用了惯性力和重力。人的步行就是动步行,动步行的典型例子是踩高跷。高跷与地面只是单点接触,两根高跷在地面不动时人想站稳是非常困难的,要想原地停留,必须不断踏步,不能总是保持步行中的某种瞬间姿态。
2.四足步行机构
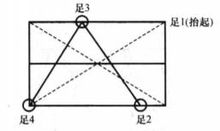
四足步行机构比两足步行机构承载能力强、稳定性好,其结构也比六足、八足步行机器人简单。四足步行机构在行走时机体首先要保证静态稳定,因此,其在运动的任一时刻至少应有三条腿与地面接触,以支撑机体,且机体的重心必须落在三足支撑点构成的三角形区域内,如图所示。在这个前提下,四条腿才能按一定的顺序抬起和落地,实现行走。在行走的时候,机体相对地面始终向前运动,重心始终在移动。四条腿轮流抬、跨,相对机体也向前运动,不断改变足落地的位置,构成新的稳定三角形,从而保证静态稳定。
然而为了适应凸凹不平的地面,以及在上、下台阶时改变步行方向,每只脚必须有两个以上的自由度。
3.六足步行机构
六足步行机器人的控制比四足步行机器人的控制更容易,六足步行机构也更加稳定。下图所示为有十八个自由度的六足步行机器人,该机器人能够实现相当从容的步态。但要实现十八个自由度及包含力传感器、接触传感器、倾斜传感器在内的稳定的步行控制也是相当困难的。
其他行走机构为了达到特殊的目的,人们还研制了各种各样的移动机器人机构。下左图所示为爬壁机器人的行走机构示意图。左图a所示为吸盘式行走机构,其用吸盘交互地吸附在壁面上来移动。左图b所示机构的滚子是磁铁,当然壁面是磁性体才适用。右图所示是车轮和脚并用的机器人,脚端装有球形转动体。除了普通行走之外,该机器人可以在管内把脚向上方伸,用管断面上的三个点支撑来移动,也可以骑在管子上沿轴向或圆周方向移动。其他行走机构还有次摆线机构推进移动车,用辐条突出的三轮车登台阶的轮椅机构,用压电晶体、形状记忆合金驱动的移动机构等。2

起重机械的行走机构行走机构包含整个起重机的行走和提升机构部件的行走。除要注意其负荷的GD2和运动阻力外,还要考虑行走路线的坡度及室外行走时风雨的影响使摩擦转矩增大的因素。行走机构的功率除由运动阻力决定的摩擦转矩外,更要考虑加减速时所需的转矩。该转矩要比静转矩大,其目的是减少加减速时间,提高运行效率。3
旋转钻机的行走机构一般,大型钻机多用履带式行走机构,小型钻机多用轮胎式行走机构,矿用钻机采用履带式的居多。为使钻机行走时有较高的灵活性,每条履带应采用单独的驱动装置。特别是小型旋转钻机,在国外均采用油马达单独驱动,也有些钻机采用电机单独驱动的。轮胎式钻机用于开采分散的小矿体更能发挥它的作用,履带式钻机多用在作业时间长、工作面比较固定的采场。还有些小型旋转钻机,其平台可以全回转,以便节省移孔位的辅助作业时间。大多数钻机的行走速度在1.2~2.8 km/h之间,爬坡能力为10°~15°,对地比压小于1。对不同的露天矿,可选用不同宽度的履带板。4
开合屋盖结构的行走机构根据台车与轨道的接触方式和轮轨数量,行走机构分为单轨单轮行走机构、单轨多轮行走机构、双轨双轮行走机构及多轨多轮行走机构4种。把一个台车与一条轨道的一个轨面有轮接触的称为单轨单轮行走机构;称为单轨多轮行走机构;其他依此类推。
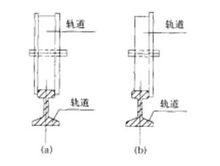
单轨单轮行走机构单轨单轮行走机构(如图)是吊车上常用的行走机构,其他形式的行走机构都源于此机理。由于软钩吊车在垂直轨道方向的水平力较小,所以吊车上常使用单轨单轮行走机构。由于开合屋盖结构垂直轨道方向的水平力较大,以及垂直向上屋盖浮力的存在,采用单轨单轮行走机构的移动屋盖很少。但对小跨度无上浮合力的开合屋盖可以考虑采用。
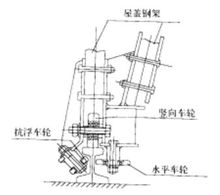
单轨多轮行走机构单轮多轨行走机构是住单一轨道的多个轨而上布置有不同功能的车轮。这些车轮的功能分别为行走车轮、导向车轮和抗浮车轮。在轮驱动方式下,行走车轮为驱动轮,其他功能的车轮均为从动轮。
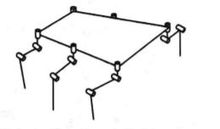
 下图行走机构只能沿着轨道方向移动,而垂直于轨道4个方向的位移都得到了约束。
下图行走机构只能沿着轨道方向移动,而垂直于轨道4个方向的位移都得到了约束。
下图移动屋盖的行走机构,它采用了轮驱动方式的单轨多轮行走机构。在移动屋盖主桁架的切线方向布置行走车轮,轨道也倾斜布置在切线平面内,在该垂直方向布置上下两个导向轮,利用轨道上翼缘和腹板形成的T形截面设置屋盖抗风上浮卡槽。为了确保在规定的不同固定停靠位置的安全,在行走机构上设置了油压驱动的锁定销栓。
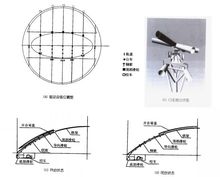
下图是Ohita穹顶开合机构图。这一机构采用了钢缆绳驱动方式、异形单轨多轮行走机构方案。驱动机械安装在地坪上,驱动方式非常简洁。其异形轨道具有异形轨道的功能,对运动方向以外各方向均进行了约束。该行走机构有别于一般情况下台车固定在移动屋盖上,随屋盖一起移动的特点,其台车是固定在移动屋盖的支承结构上,屋盖在台车上移动。为了防止钢绞线与结构冲突,而特为钢绞线布设了导向轮。
单轨多轮行走机构适用于行走轨道平面内荷载较大,而与其垂直的导向轮方向的横向荷载较小的情况,行走机构紧凑,尺寸较小。一般来讲,异形轨道比普通单轨单轮轨道更适合承担较大的横向力和抗浮荷载。
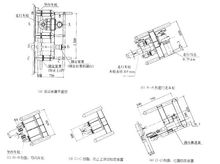
双轨双轮行走机构一般来讲,双轨双轮为台车在两个相互垂直方向上各布置一个轮轨装置,主要受力方向的轮为行走车轮,另一个方向为导向车轮。在轮驱动方式下,行走车轮为驱动轮,其他功能的车轮均为从动轮。双轨双轮行走机构适合移动屋盖根部或行走机构只承受单方向力和单方向水平合力的情况下,且移动屋盖的尺寸为中小规模的开合屋盖结构上。下图是某小型开合屋盖结构行走机构图,作为一种较特殊的情况,两个轮均布置在了同一个方向,用轨道边缘导向,用L型金属件抗浮。
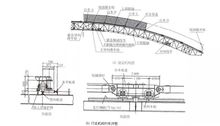
下图是小松穹顶的驱动与行走机构,移动屋盖采用钢缆绳牵引、普通双轨双轮行走机构,由于移动屋盖采用了人字型铰接结构,移动屋盖对支承结构产生竖向压力和水平推力,移动屋盖还受有风的上浮力,为此,设计者采用了一个竖向轮轨和一个水平轮轨的双轨双轮布置方案,用以约束和传递竖向压力和水平推力。由于受到空间尺寸和建筑外形的限制,屋盖的抗浮没有采用普通的轮轨方案,而是采用了一种特殊的装置。该装置还有另一个的作用——防止在开合过程中发生地震时移动屋盖脱轨。
由实例看出:从受力看,台车或行走机构受有3个方向的作用力,其中两个方向的荷载较大,另一方向是出现概率较小、持续时间极短的风荷上浮合力或防止地震脱轨的约束;从约束看,需要从3个方向对台车加以约束。实例采用双轮双轨行走机构,轮轨布置在两个主要受力方向,受力较小方向的安全防范抗浮装置采用非轮轴装置。
多轨多轮行走机构多轨多轮行走机构是在每个需要约束方向的平面内均布设一个或两个普通轮轨行走装置。这些车轮分别为行走轮、导向轮和抗浮轮。主要受力方向布置的车轮称为行走轮,与行走轮在同一平面内相反方向的轮为抗浮轮;在垂直行走轮平面内的车轮为导向轮。有时导向轮也具有行走轮的部分功能。在轮驱动方式下,行走轮为驱动轮,其他车轮均为从动轮。
多轨多轮行走机构适用于大跨度、大规模的移动屋盖体系。由于需要在垂直行走方向的4个方向的轨道槽内布设轮轨,加之机械检修空间,所以轨道槽及其支承结构的刚度、强度、尺度都要很大。
除局部块状划分的空间移动方式的开合屋盖外,多轨多轮行走机构适用于各类刚性屋盖划分方法的开合结构。5

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国