

随着智能手机的普及,生活中的点点滴滴,只需要轻点手机屏幕就能轻松记录。然而,当我们看着手机拍摄的一张张照片时,总会觉得照片有些不对劲,用一个词来描述就是——单薄。
我们生活的世界是丰富多彩且立体的,但拍出来的照片却是一个二维的平面,相比于真实场景,照片往往会损失许多信息。不仅如此,手机拍摄的图片有时还会出现视觉错位的现象,比如下面这张图:

“道理我都懂,但是为什么这个鸽子这么大?”
(图片来源:论坛截图)
所以,为了能让照片里的物体形象立体起来,激光雷达应运而生,有了它你就能轻轻松松在二维平面中get一个三维模型啦~
激光雷达帮你快速感知物体大小
人类依靠双眼来观察这个世界,但你可能不知道的是,我们的两只眼睛接收到的图像是存在差异的。
下面不妨一起来做个小实验,首先交替眨眨你的左右眼,然后仔细观察左右眼看到的物体,这时你会明显察觉到左右眼成像的差别,一般来说物体离眼睛越近,左右眼观察到的差异越大。
这是因为根据双眼之间的视觉差异,大脑会为我们“脑补”出一个立体的世界,使得我们能够轻松感知物体的大小和物体之间的位置关系。
那么,能不能让手机也拥有感知三维物体尺寸的能力呢?
当然没问题,你只需要给手机装上激光雷达就行。加上激光雷达后,手机也能探测三维空间信息,这能为我们带来更加丰富的体验。比如,拿手机来当尺子。在手机配备激光雷达之前,测量物体尺寸功能虽然也存在,但是精度差强人意,有了激光雷达之后,测量精度将大大提高。

拿手机摄像头测量出的键盘尺寸与实际尺寸差了2厘米,误差比较大;拿搭载了激光雷达的手机测量时,误差小于0.3厘米
(图源:作者自制)
除此之外,还能直接给物体建模,把模型存到手机里。

利用搭载了激光雷达的手机扫描汽车
(图源:3D Scanner)

扫描后建成的模型
(图源:3D Scanner)
有了这个功能,遇到想要记录的小玩意就能轻松地建立一个三维模型。比如给家里的冰墩墩做个数字模型,这样就能随时跟朋友炫耀分享自己的冰墩墩。
那么手机是如何利用激光雷达来测量物体形貌的呢?
为什么激光雷达这么厉害?
要想了解激光雷达的运行机制,我们得先从雷达二字说起。1886年,德国物理学家发现无线电波能被物体反射,在这基础上,科学家们提出假设——如果能够记录发射无线电波的时刻,等无线电波撞到远处飞机后反射,再记录无线电波返回时所处的时刻,两个时刻相减就是无线电波从探测器行进到飞机再返回的时间。加上我们知道无线电波的传播速度是光速,据此就可以计算出来我们跟飞机的距离。基于这个假设,雷达逐渐发展完善,并广泛应用于军事、航海等领域。

雷达探测原理演示
(图源:wikipedia)
激光雷达的原理与传统的雷达是相同的,区别在于激光雷达的探测精度大大提高了,而这也正是因为使用了激光。实际上,无线电波跟激光都是电磁波,只是二者的波长不一样,取了不同的小名。太阳光也是电磁波。
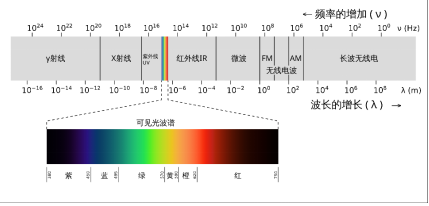
按波长划分的电磁波谱,人眼能感受到的一部分称为可见光谱;激光雷达用的是可见光旁边的红外线。
(图源:Wikipedia)
**衡量电磁波有很重要的一个指标:波长。**雷达使用的无线电波,波长范围是在1-10厘米;激光雷达使用的激光,波长是0.85-1.55微米(1厘米等于10000微米)。
波长好比尺子上的最小刻度,波长越小,测量精度越高。激光雷达测量距离的精度能够达到3mm,与之相对的是它牺牲了测量的最大距离,激光雷达的最大测量距离大概是300米,而军用雷达虽然探测精度不高,可探测距离高达上千公里。
激光雷达发射出去许多光线,光线照射到物体上形成一个小光点,光点的距离和方向信息都会被记录下来,这些点就构成了一个数据集,被称为点云,点云包含了物体的三维轮廓信息。
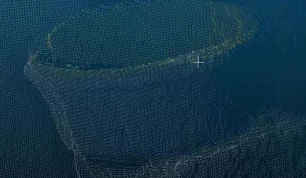
激光雷达测得一个盆子的点云数据
(图源:作者自制)
激光雷达测量到物体的轮廓信息后,再结合摄像头捕获的物体颜色信息,接下来就可以对物体进行3D建模啦。

结合摄像头颜色信息得到的建模数据
(图源:作者自制)
需要注意的是,有了激光雷达,虽然能衍生出许多新颖的应用,但目前仅有极少数手机搭载了激光雷达,在手机上集成激光雷达,不仅只是一个技术问题,还涉及到价格,体积等因素,这简直是螺蛳壳里做道场——太难了。

在对苹果的褶皱以及纱布进行建模时,手机lidar的建模效果不太好
(图源:作者自制)
不过,激光雷达在另一个应用领域——自动驾驶中的表现,能够给我们一些信心。2015年,供汽车使用的激光雷达一个就要几十万,比车还贵,而现在车载激光雷达的价格却已经降至几千元甚至更低。
所以我们相信,装在手机上便宜又好用的激光雷达也会很快普及。到那时候,会有一大波让人“哇塞”的新玩意儿出现。
编辑|王婷婷
参考文献:
[1] https://zh.m.wikipedia.org/zh
[2] https://en.wikipedia.org/wiki/Radar
[3] Sirmacek B , Lindenbergh R C , Menenti M . Automatic registration of Iphone images to LASER point clouds of the urban structures using shape features[J]. Isprs, 2013, II-5/W2:265-270.
[4] Luetzenburg, G., Kroon, A. & Bjørk, A.A. Evaluation of the Apple iPhone 12 Pro LiDAR for an Application in Geosciences.
出品:科普中国
作者:海里的咸鱼
监制:中国科普博览



 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国