

由于机器人技术、通信系统、人工智能和计算机视觉等领域的不断进步,移动式机器人正越来越多地融入现代生活。从战争到国内应用,从搜救到采矿,从水下作业到宇宙空间探索,移动式机器人正变得越来越强大,如海尔智慧工厂中的工业机械臂、京东智慧园区中的分拣机器人、危险环境下的拆弹机器人等等。21世纪以来人类对于勘探和采矿、极端环境探索、远程医疗与手术等工作安全性的需求与日俱增,提高了增强移动式机器人远程操作技术的必要性。远程和数字图像采集技术、机器学习和深度学习技术、网络化控制和通信技术等,为机器人遥操作(Teleoperation)的研究奠定了理论基础。



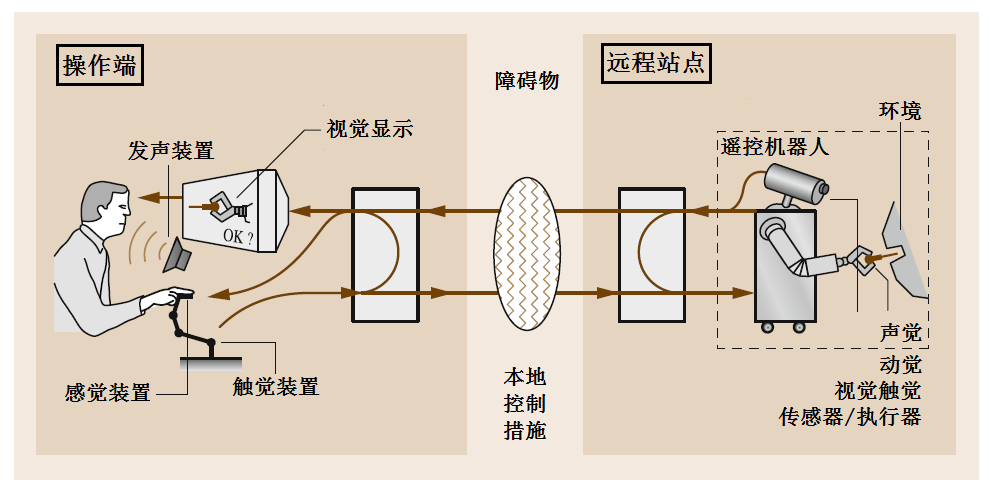
希腊术语“tele”的字面意思是“遥远的”或“在远处的”,这自然意味着“Teleoperation”被定义为远程操作。人类感知和操作的能力可以通过远程操作来扩展到比较遥远的位置,这种技术对于一些危险及重复性的工作来说既保证了安全性又极大提高了工作效率。机器人遥操作是网络化控制的一种,其中人类操控者通过通信信道与机器人进行通信和监视,收集有关远程环境的信息,作为控制者可以提供与任务完成相关的命令或建议,通过算法转换成控制命令,机器人根据操控者的控制和反馈执行任务。
为了保证这样一个遥操作控制系统的稳定性,人们提出了不同的控制技术,如协同控制、自适应控制、滑膜控制等技术。然而,所有这些控制机制都会受到时延和间歇通信的负面影响,不完整的态势感知以及时延和间歇通信都可能使遥操作机器人与操控者的命令相背离。信号在遥操作系统的各部分之间通过网络进行交互,时延是网络的根本属性,是不可避免产生的。时延是由于在通信信道上传输数据或信息时所花费的时间而引起,有研究表明,时延从低至10-20毫秒时开始影响遥操作人员的感知,如果时延从8.3 毫秒增加到225 毫秒,遥操作机器人反应时间就会增加64%,错误率增加214%,这已经影响到遥操作系统的性能,如果不解决网络时延问题将会在实际应用中产生严重事故。
5G技术的应用给遥操作技术带来了巨大便利,对于一个遥操作系统,主控端和从控端通过网络进行连接,对此而言,时延是影响操作体验的主要问题,延时的反馈数据往往会对操作者造成干扰影响判断,操作失误的概率大大增加。通过5G技术,能够把网络时延控制在很小的一个范围内,操作的实时性和安全性将得到提升,这在细致的工作中表现得尤为明显,特别是微创手术及远程手术,都将受益于5G技术。所以,5G技术对于遥操作不仅在数据传输实时性、传输速率上有着明显的提升,还保证了整个控制系统的稳定性,使应用在复杂环境下的工作安全得到了保障。
近期,全国首例“量子远程手术”在山东青岛顺利实施,正是中国移动5G技术与遥操作技术的完美应用。在青岛移动5G量子加密通信网络的保障下,青岛大学附属医院的牛教授在远隔260公里的威海通过操控主机械臂来带动青大附院手术室里的从机械臂成功为患者实施了肾部分切除手术。一直以来,远程手术的主要技术难题,取决于网络稳定性和数据安全性。在青岛移动5G网络技术团队的支撑下,成功将手术过程中的平均时延限制在了10毫秒以内,并且能在网络信道数据传输的过程中对网络运行情况进行监测,对时延有着积极的补偿作用,极大提高了手术的安全性和遥操作系统的稳定性;同时本次通过中国移动量子加密技术进行远程通信的数据链接,将通信网络和量子加密设备相结合,通过量子信道进行量子密钥分发、传统信道进行密文传递,建立起远程手术遥操作系统两端的量子加密安全保密专线,实现了对手术传输各节点间通信数据的完全保护,有效解决了远程手术过程中网络质量和数据安全的风险点。

未来,5G通信技术、基于人工智能的人机交互界面、深度神经网络、量子加密技术、人类情感和手势识别、未来视频帧预测、图像和视频生成、自适应控制技术等这些前沿技术等都将充分应用到遥操作研究中,可以显著增强操作者对环境的感知、对机器人的控制,减少操作者的工作量、错误和延迟的影响,对我们的生活和生产需要有着极大的提升。
供稿单位:山东移动青岛公司
作者:李治辰


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国