

海水覆盖了地球约71%的表面积,海洋学者认为人类只探索了其中的5%。目前已知的海洋最深处位于西太平洋的马里亚纳海沟,约为10900 米。这里的水压高达1100个大气压,相当于将一辆小汽车的重量全压在指尖上。对于人类的工程设备而言,深海极高的环境压力也是一个严酷挑战,所以深海探索长期以来都是工程技术领域的难题。
目前,设计精良的水下机器人在深海任务中具有出色的机动性和功能性,勘探深度能达到3000~11000米,比如我国自主研发的“蛟龙号”和“奋斗者号”载人潜水器,在深海探矿、海底高精度地形测量、可疑物探测与捕获、深海环境与生物考察等任务中都扮演着关键角色。
受深海生物特性的启发,来自浙江大学、之江实验室的科研团队及其合作者开发了一种能用于深海探测的无线自供能软体机器人,他们通过在马里亚纳海沟最深10900米处和南海最深3224米处进行实际测试,验证了这种机器人具有极好的耐压和游泳性能。
图为钝口拟狮子鱼
| 灵感来源于一种深海鱼
为了让执行水下探测与考察任务的人造潜水器能够深入海底,以往的设计策略一直是“硬碰硬”,即选用高强度的耐压金属外壳(如钛合金)或压力补偿系统作为“盔甲”,以此来保护内部机电系统。无论是深海遥控潜水器还是载人潜水器,都普遍采用了这种技术。
随着水域越来越深,外壳的厚度和尺寸也需要相应提升,设备体积也会越来越大,因此传统的深海机器人和载人深潜器都具有厚重的外壳。人类第一艘到达马里亚纳海沟的潜水器“的里雅斯特号”长度就超过15米,载人舱室就重达14吨。然而,近年来的深海生物科考进展为深海装备研究提供了崭新的思路。研究表明,在6000米以下的超深渊带这样的恶劣环境中,仍有数百种物种生存。在这些类群中,尤其以深海狮子鱼的分布最深、垂直分布跨度最大。
我国科研团队设计开发的这款软体机器人,灵感就是来自钝口拟狮子鱼。早在2014年,科学家就在马里亚纳海沟中约7000米处深度捕获到了这种鱼类,据了解,钝口拟狮子鱼还创下了一项人类拍到活体鱼类的最深纪录--8178米。
形态学研究表明,深海狮子鱼体内存在大量的胶状物质,这对于它们平衡内外压力具有重要作用。另外,它们的骨骼进化出了一些适应于深海压力环境的特征:头部骨骼呈细碎状,分布在软组织中;绝大多数骨骼皆为软骨,有效降低了硬质骨骼在高静水压下的局部应力集中。
受此深海狮子鱼启发,科研团队开展跨学科交叉研究,采用“以柔克刚”的策略,突破性地提出机电系统软、硬共融的压力适应原理,研制出了一种全新的深海软体机器人。该软体机器人摆脱了厚重的外壳,外表酷似一只深海狮子鱼。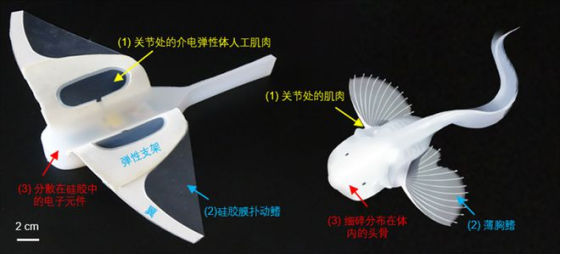
软体机器人与钝口拟狮子鱼对比图
| 软体机器人内部结构
该软体机器人的核心设计正是参考了深海狮子鱼的两个特征:第一,摒弃了笨重的抗压外壳,采用软质有机硅材料作为主要躯干,将控制电路、电池等各种精密的电子元件均匀分散到柔软的硅树脂基体中,优化了高压环境下机器人体内的受力情况,这种设计消除了对耐压外壳的需求,启发则是来自钝口拟狮子鱼分布的头骨。
第二,摒弃了传统潜水器电机--螺旋桨式的推进方式,无需考虑这些传统推进器的密封问题。机器人采用了电驱动的鱼鳍状仿生推进翼,通过节律性地拍动推进翼让机器人在海中前进。前一个特征很好地吻合了深海狮子鱼适应深海超高压的骨骼分布特点,后一个特征则借鉴了深海狮子鱼等深海生物的鱼鳍。
在第二个特征中,鱼鳍状推进翼的运动则是靠一种叫作介电高弹聚合物的“人工肌肉”实现。这种材料能将电能转化为机械能,加上电压即可产生大变形。研究人员通过结构设计将“人工肌肉”材料制作成鱼鳍推进翼,并巧妙地利用了围绕在“人工肌肉”外的海水作为离子导电负极,由软体机器人自带能源在“人工肌肉”内外侧周期性地产生电势差,让聚合物发生舒张与收缩形变。这样一来,鱼鳍推进翼即可节律性地拍动,实现软体机器人水中游动。此外,研究人员还针对深海的低温高压工况对“人工肌肉”进行了材料改进,解决了其电驱动能力衰减的问题,即便在马里亚纳海沟的低温(0~4摄氏度)、高压环境(1100个大气压)下也能正常工作。
该软体机器人身长22 厘米(体长11.5厘米,尾长10.5厘米),展翅28厘米,大约为一张A4纸的长宽。配有电力和控制电子设备,包括锂离子电池、高压放大器、红外接收器、放电电阻器和芯片。内置的2500毫安锂离子电池作为能量来源,通过高压放大器对电源电压进行放大后,输出周期性电压,驱动人工肌肉变形进行扑翼运动,在充满电的情况下,机器人的续航时间可达45分钟。
2019年12月,软体机器人在马里亚纳海沟随深海着陆器下潜坐底10900米,并首次成功实现了深海电驱动。在2020年7月我国南海的海试试验中,软体机器人由无人潜水器携带到3224米的深度后,按预设程序成功实现了自由游动。
机器人深海试验
| 困难与发展前景
研究人员表示,在海洋中布置这种设计的机器人之前,还有很多工作要做。因为这项研究开发的机器人比之前报道的水下机器人移动要慢,而且不能承受太多环境的干扰,比如它很容易被水下暗流冲走,其运动能力也需要针对实际应用进行优化。
从长远展望来看,人们可以预测海洋生物学研究的发展方向。深海软体智能系统具有很好的环境友好性、生物交互性和低成本优势。通过搭载一系列功能性的深海柔性传感器和信息采集模块,未来软体机器人和软体机器手可在深海原生态环境下,发挥无损检测、样本采集、人-机-物交互等方面的独特优势,进一步为推动海洋监测、清理和防治海洋污染、保护海洋生物多样性提供更多创新方案。更重要的是,它们可以帮助科学家探索海洋深处的大片未知地带。
(图片来源于网络)作者 | 顾俊哲计算机科学与技术硕士,毕业后从事网络信息收集与整理工作,关注大众科普知识,探索前沿科技。




 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国