

9月4日,印度月船3号着陆器在进入休眠前,曾在月球表面完成了一次跳跃。印度空间组织表示,着陆器启动发动机进行了约40厘米高度的一次跳跃,并在距离起跳点大约30~40厘米的地方软着陆。印度着陆器的“跳跃”操作并不稀奇,事实上在太空探索领域,“航天器跳起来”越来越成为一种流行的地外星球探测方式。
跳跃探测成潮流
目前人类送往地外星球表面的探测器可分为固定的着陆器和可移动的巡视器两类,前者开展原位探测,后者则离开着陆点,实施移动探测。不过,轮式巡视器虽然探测范围扩大了不少,但也非常容易受到岩石、沟壑等地形障碍的限制,探测效率仍有待提高。

日本隼鸟2号探测器上的MINERVA-II-1跳跃探测器
此外,在进行彗星和小行星等超低重力环境的表面探测任务时,巡视器还要面临无法贴合地面的问题,这无疑增大了探测任务的难度。
针对这一现状,科研人员开始关注地形适应性更好的跳跃探测器。相比轮式探测器,跳跃探测器不仅结构简单,还可以在崎岖地形上移动更长的距离,尤其在微重力的环境下具有明显技术优势。
此外,在寻找水冰资源的探测任务方面,跳跃探测器的作用更是独到。由于水冰大多存储在地外星球的永久阴影区内,探测设备往往很难抵达,只有采用跳跃探测器才能实现近距离探测。根据公开资料,中国将向月球南极发射的嫦娥七号探测器,其上搭载的飞跃探测器就可以直接“飞”进永久阴影区寻找水冰资源。而且它在完成一次探测任务后,还可以“飞”回光照区进行充电,以便继续执行下一次永久阴影区的探测任务。
结构设计造型多
按照外形结构,跳跃探测器一般可分为腿式、球式和立方体式等。腿式探测器即目前常见的多足机器人,而球式探测器则是将探测仪器“包裹”于球形外壳之中。目前在小天体表面探测任务中,科研机构更多偏向于立方体式跳跃探测器,相较于腿式和球式,立方体式探测器不仅结构简单、易于控制,还具有表面稳定性好等优点。
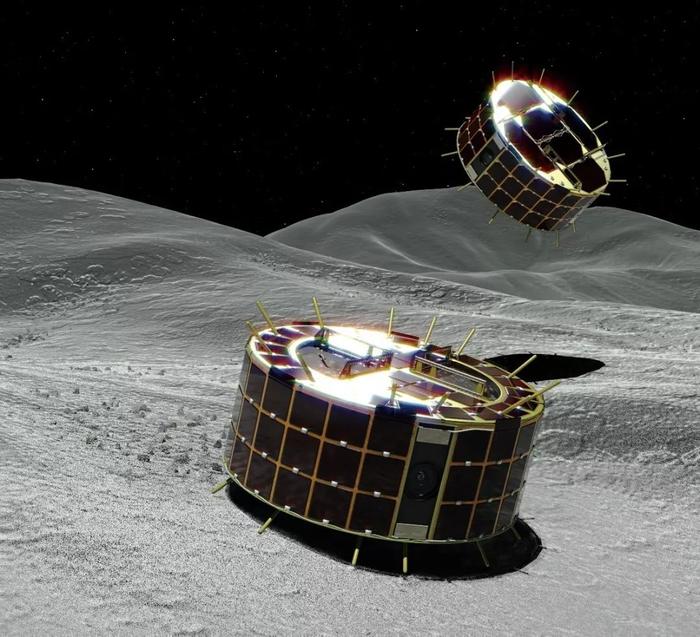
模拟图,MINERVA-II1中的Rover-1A和Rover-1B降落在小行星龙宫。
按照驱动方式,跳跃探测器又可分为火箭推进、压缩气体推进、动量推进和机械推进等类型。火箭推进即探测器利用自身携带的剩余推进剂,重新启动发动机推动跳跃,这种方式跳跃次数有限,而且对火箭发动机的重复使用性能提出了要求。
利用压缩气体进行推进,可以用探测器本身所携带的压缩气体,也可以用探测器周边环境中现存的气体。比如美国曾计划推出一种面向火星环境的小型核动力跳跃探测器。这种探测器在静止状态时,器上设备对周边地区展开研究,同时动力装置则会慢慢吸入周围的二氧化碳并进行冷冻。当需要跳跃时,探测器上的核热装置便会加热这些二氧化碳,使其快速气化,从而产生喷气流,将探测器抬升至目标高空。
利用动量推进,则需要先在探测器内部安装一种名为“扭矩器”的设备,这种设备实际上就是一个转动惯量比较大的电机。在“扭矩器”的驱动下,跳跃探测器的底板会对星球表面产生一个反作用力,把自己弹起来。通过调整底板的角度,“扭矩器”可以驱动探测器向不同的方向跳跃。通过调节磁场强度,“扭矩器”还可以改变探测器跳跃的速度。
机械推进更常见于腿式跳跃探测器中。研究人员曾提出一种可跳跃的四足机器人,其由机身与4组腿部构成,每个腿部包含2个并列对称放置的电机,分别驱动大小腿运动。当需要跳跃时,可以通过控制关节电机运转角度,带动大腿快速转动,改变足端的位置,从而实现跳跃。
现实难题跳不过
虽然跳跃探测器在太空探索领域应用前景广阔,但要实现探测器的高效运动,还需要解决两大现实难题:一是如何在每次弹跳落地后,能够保证探测器恢复直立,不影响下一次跳跃;二是如何提高探测器自主规划路径的能力。
为了保证着陆的稳定性,科研人员除了在探测器的结构和外形上下功夫,还会利用动力学仿真和地面试验等方式,对跳跃探测器的着陆缓冲效果进行验证。
而优秀的路径规划则可以减少探测器的跳跃次数,同时降低与星球表面的碰撞几率,大大提高探测效率。不过,由于地外星球与地球的通信延迟往往很高,控制人员难以为探测器实时规划路线,这就对跳跃探测器的自主路径规划能力提出了很高的要求。随着智能化技术在航天领域的进一步应用,探测器自主规划路径的能力正在稳步提高。
未来应用前景阔
展望未来,跳跃探测器还可能在以下几个方面获得进展。首先是核能技术的应用,因为在永久阴影区和太阳光易被遮挡区域,如果探测器仍然完全依赖太阳能,其工作效率和任务寿命将大打折扣。
而随着材料和动力等方面的技术条件更加完善,跳跃探测器未来也可以尝试大型化方案,以一次性装载更多的探测设备。比如国外就曾论证过一种“机器袋鼠”,它的跳跃高度可以达到5米,移动速度更是能够接近时速40公里。
此外,人工智能技术和仿生学技术的进步,也将推动地外星球探测器的技术变革。我们不妨想象,在未来的哪一天,人类制造的新概念探测器在到达目标星球后,可以根据现场的地貌和气候条件,自主变形为不同的“机器生物”,游走于星球的高山深壑之间,将人类对宇宙的认知扩展到一个全新的领域。
(作者:王江宁)



 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国