

随着科学技术的迅速发展,机器人技术已经成为科学研究最为活跃的领域。移动机器人作为机器人学中的一个重要分支,代表着机电一体化的最高成就。
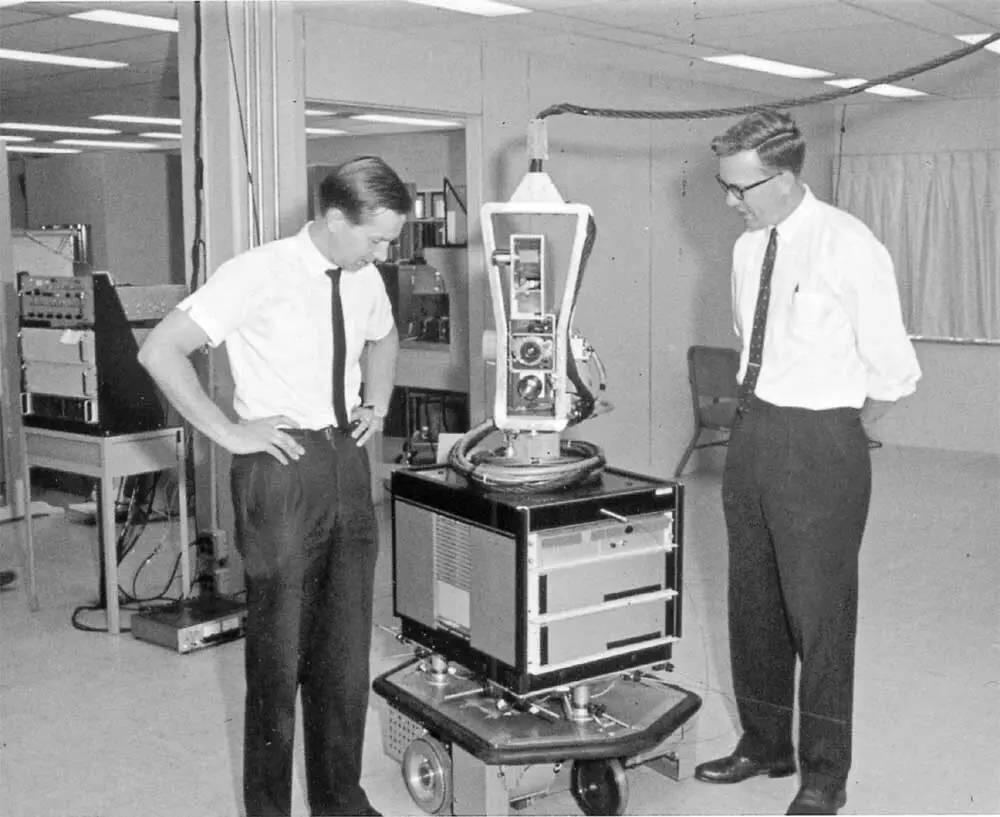
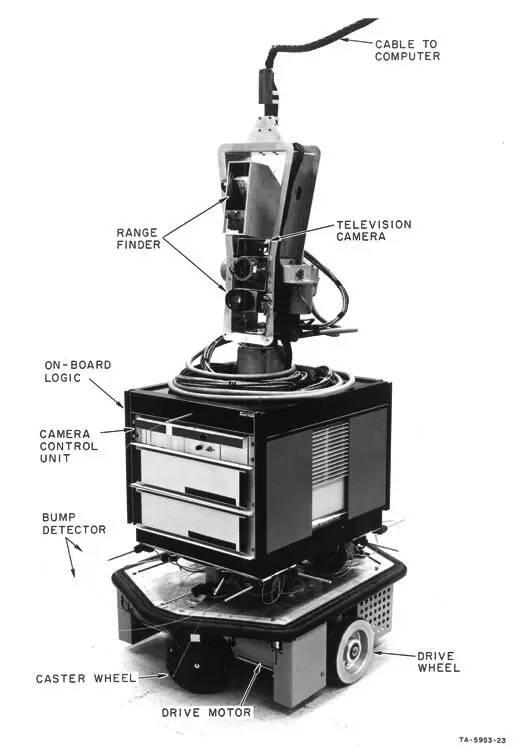
早在60年代,世界各国就已经开始了关于移动机器人的研究。1968年,斯坦福研究所发明了世界上第一台移动机器人。
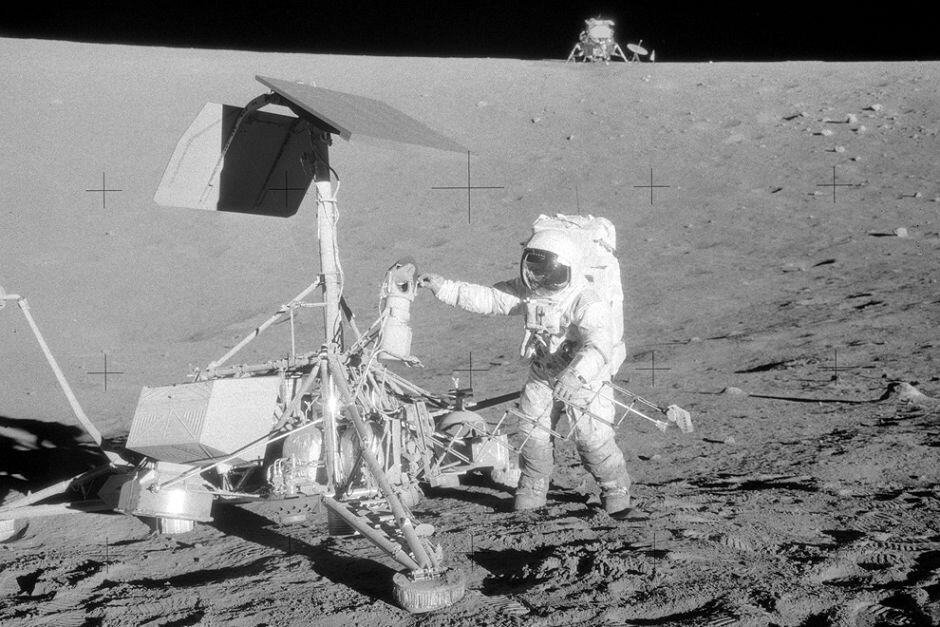
60年代后期,美国和苏联研制了月球探测移动机器人,其操作器在地面的遥控下,完成了在月球上的多个重大任务。
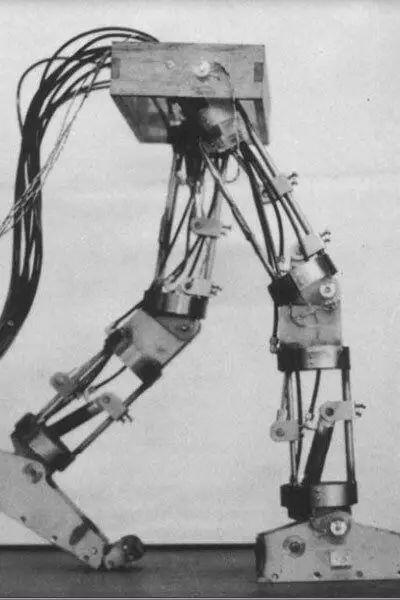
70年代初期,日本早稻田大学研制出具有仿人功能的两足步行机器人,是移动机器人发展的重大里程碑。
进入90年代,移动机器人开始应用于各个领域,向实用化进军。近年来,移动机器人逐渐智能化,可以替代人类从事许多危险性工作,为我们的生活带来了极大的便利。
随着智能化时代的到来,移动机器人以其犯错率低、节约成本、可持续工作、工作效率高等优势,成为了我们生活中必不可少的角色。过去几十年间,机器人逐渐开始代替部分人工参与到工作中。仓储移动机器人出色的打包、分拣、搬运等能力,使其在物流领域发挥着巨大作用。 地震后废墟结构极不稳定,极易对废墟中的救援人员造成危险,排险移动不仅保障了救援人员的生命安全,更是在危急时刻提高了被困人员的生存率。在一些火灾事故中,由于求助不及时、消防员无法及时救灾等原因而导致不可挽回的惨案时常发生,此时消防机器人便可发挥决定性的作用。除此之外,机器人在工业、农业、医疗、服务等行业中也得到广泛了的应用。
移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统,下面我将从环境感知、自主定位和路径规划这三个机器人技术的重点问题介绍移动机器人的关键技术。
目前,移动机器人在室内环境中,以激光雷达传感器和其他传感器共同作用的自主环境感知技术已相对成熟,而在室外应用中,由于环境的多变性及光照变化等影响,环境感知的任务相对复杂的多,使得多传感器融合技术已成为机器人环境感知面临的重大难题。
移动机器人要实现自主行走,定位也是其需要掌握的核心技术之一。近年来,SLAM技术发展迅速,已成为移动机器人导航的主流定位技术。行业内领先的移动机器人,大多采用了SLAM技术。
对于智能移动机器人来说,路径规划是其必须而且非常重要的一项技术,通过最优的路径规划,能够保证机器人从起点开始寻找一条最优的无碰路径直到抵达终点。
当前,我国移动机器人的研究主要集中在信息处理、导航控制上。随着其智能化程度的提高和成熟,移动机器人必然要向着具有操作能力的方向发展。给移动机器人 装备 操作机械手 等 是目前该领域的研究热点和发展方向。随着移动机器人应用领域的不断拓展,其工作复杂度加重,对移动机器人的要求不再局限于单个机器人,多移动机器人系统的研究也已成为研究的另一个热点。
随着互联网时代的到来与人工智能的普及,移动机器人必将向着网络智能化、情感化发展。并为各个特殊领域发挥其作用。
当今时代,网络已经遍布了我们生活的各个角落,移动机器人联入网络系统也是大势所趋。研制网络化移动机器人,就是以计算机网络作为研究的载体,对移动机器人设定相关的指令进行有效的控制,通过网络化技术的研究,将极大地推动移动机器人的发展。
根据不同的领域对于机器人的需求程度不同,对于一些高风险、高精度等工作,均可以让智能移动机器人进行代替,这样既保证了人类的安全,也能够提高工作的效率。总之它的研究领域是十分广阔的,且在研究的过程中是有利于社会的发展的。机器人与人类最大的不同,就是机器人是根据特殊的程序设定出来,不具有情感。目前,情感移动机器人已经成为了当前研发人员研究的重点。高智商高情商的移动机器人一旦被研发出来,将会使整个人类社会产生巨大的改变。


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国