

人类在地球上行走已有大约30万年,相对于地球历史的宏伟长河,这是一个难以想象的时间段。事实上,我们人类在地球上的存在仅占了地球历史的0.007%。因此,影响我们对进化的理解、并启发当今机械系统的“现代动物王国”,其实只是历史上存在的生物的一小部分。
近日,“海洋与湿地”(OceanWetlands)小编读到一篇来自卡内基梅隆大学的最新研究,其关键词是“古生物工程学”,提供了一种新视角。该研究发表在2023年11月6日的《美国国家科学院院刊》(PNAS)上。
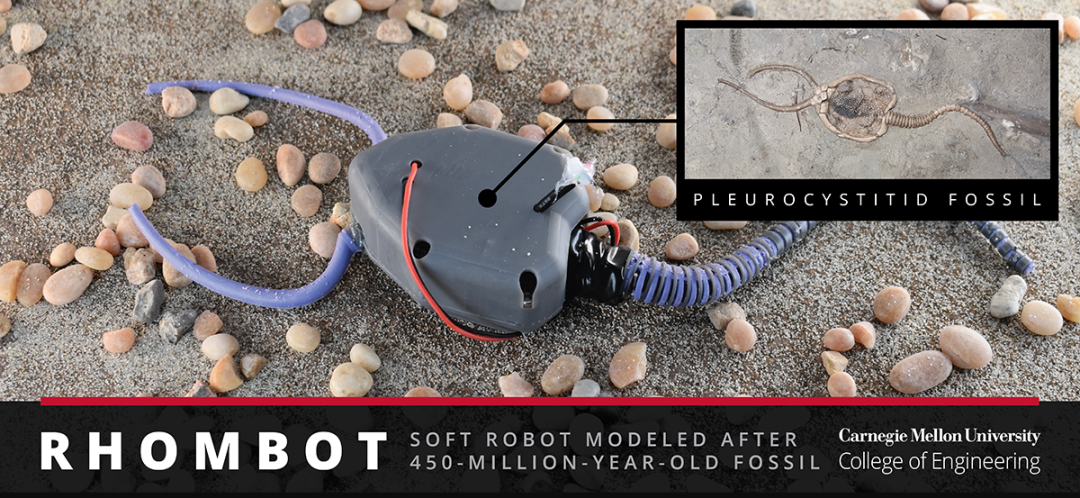
图片来源:卡内基梅隆大学
近日,美国卡内基梅隆大学机械工程系的研究人员与西班牙和波兰的古生物学家合作,通过软体机器学,即软体机器人使用柔软电子和软材料,成功复制了一种存在于近4.5亿年前的海洋生物,被认为是最早能够通过肌肉茎运动的棘皮动物之一。
为了拓宽我们对动物设计和运动的视野,卡内基梅隆大学机械工程系的研究
人员与西班牙和波兰的古生物学家合作,推出了一项新颖的领域——古生物工程学。这一领域旨在使用软体机器学,即带有柔软电子和软材料的机器学,以了解使用已灭绝生物驱动进化的生物力学因素。
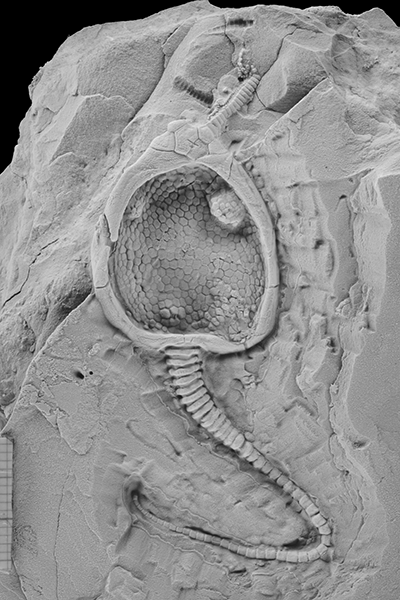
pleurocystitid是一类已灭绝的古老海洋生物,属于棘皮动物门。它们生存在距今约4.5亿年前的奥陶纪晚期~志留纪早期,属于古老的棘皮动物类群。
图片来源:卡内基梅隆大学
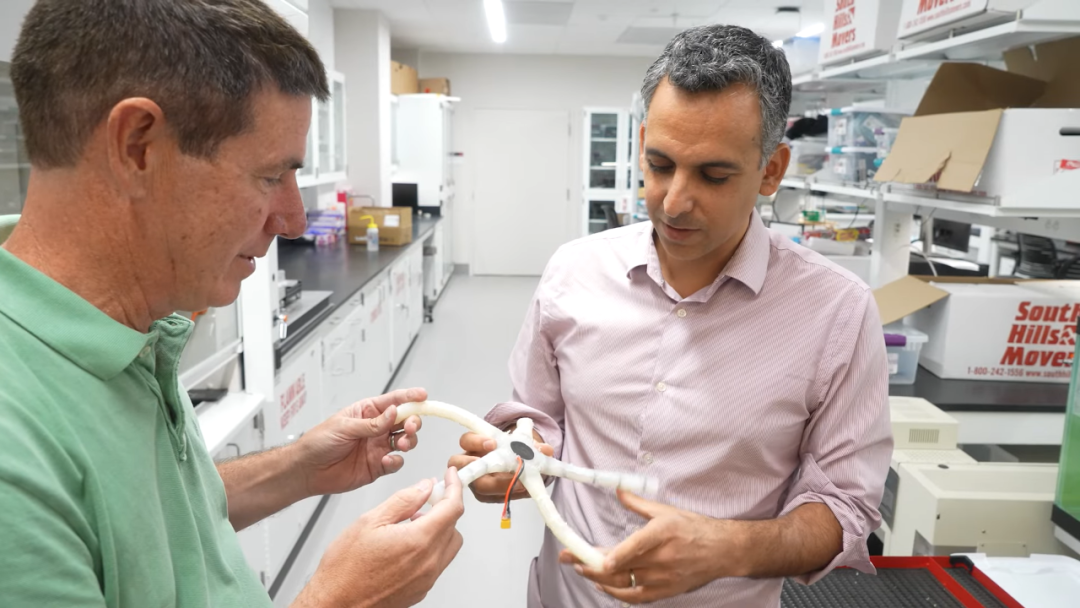
内基梅隆大学机械工程系教授Phil LeDuc表示:“我们的目标是使用软体机学将生物系统“复活”,即我们可以模仿它们、来了解它们的运作方式。”
在LeDuc和Carmel Majidi领导的研究团队的计算模拟和软体机器人的帮助下,他们让这种存在于近4.5亿年前的海洋生物——pleurocystitid,重新焕发了“生机”。
Pleurocystitid是棘皮动物类的一员,包括现代海星和海胆,它们是最早能够通过肌肉茎运动的棘皮动物之一。尽管缺乏现代类似物,但由于在棘皮动物进化中发挥着关键作用,古生物学家对pleurocystitid一直很感兴趣。
Majidi解释道:“软体机学是使用软材料构建柔软机器臂和附肢的另一种方法。只有通过回顾动物的进化时间线,我们才能完全解释生物学和自然的许多基本原理。我们正在建造机器类比体,以研究运动是如何改变的。”
团队使用化石证据指导他们的设计,并使用3D打印元件和聚合物来模仿移动附肢的柔软柱状结构,以构建这个机器人。他们证明pleurocystitid可能能够在海底移动,借助一个推动动物前进的**“茎”,并确定大幅度的扫动运动**可能是最有效的运动方式。研究还发现,增加茎的长度显著提高了动物的速度,而不会使其付出更多能量。
“受生物启发的机器人领域的研究人员,需要从随时间演变的生物中选择重要的特征。”Richard Desatnik,在读博士生、共同第一作者说道。
Zach Patterson,卡内基梅隆大学校友和共同第一作者补充说:“基本上,我们必须制定出好的运动策略,来让我们的机器人运动。例如,一个“海星机器人”,是否真的需要使用5个肢才能运动?亦或,我们能找到更好的策略?”
关于pleurocystitid的一个最大的未解之谜,是它们生活环境中的表面类型如何影响它们的运动(如沙子、泥土)。现在,团队已经证明:他们可以使用软体机学工程化已灭绝的生物,他们希望探索其他动物,比如第一个能够从海洋到陆地移动的生物——这是使用传统机器人硬件无法研究的。
LeDuc教授说:“给一个近5亿年前存在的生物注入新的“生命”,这本身就令人兴奋,但这一突破真正令我们激动的是——我们将能够从中学到多少?”他补充说:“我们不仅仅是在地下挖掘化石;我们正在通过与出色的古生物学家合作来更好地理解生命。”
背景TIP:什么是**“软体机学”**
“软体机学”(Soft Robotics)是一种机器人学的分支,专注于设计和制造柔软和可变形的机器人系统,使其更能够适应不同的环境和任务。传统的机器人系统通常采用硬材料和刚性结构,而软体机器人则采用柔软的材料,例如弹性聚合物、硅胶等,以模仿生物体的柔韧性和适应性。
软体机器人的设计灵感通常来自生物体,尤其是动物的运动和行为。这种机器人在许多领域都表现出潜在的应用前景,包括医疗、制造业、服务业、救援任务等。因为其柔软的特性,软体机器人可以更安全地与人类和复杂环境互动,同时也能够执行一些传统机器人难以完成的任务。
软体机学不仅涉及机械工程和材料科学,还包括控制系统、计算机视觉和人工智能等多个学科的交叉研究。这一领域的研究旨在推动机器人技术的发展,使之更加适应多样化的应用场景和任务。本文就是软体机学的一个应用案例。
图片来源:卡内基梅隆大学
背景TIP:什么是“古生物工程学”
古生物工程学(Paleobionics)是一个新概念,是一个古生物学和生物工程学的跨学科新领域。这一概念指的是利用现代生物工程技术来研究、模仿和应用古代生物的生物学特征和结构。古生物工程学旨在从已经灭绝的生物中获取灵感,进而创造新的技术、设计和工程解决方案。
在古生物工程学中,研究人员可以通过对古代生物的化石、骨骼和其他遗存的解剖学和形态学研究,以及现代生物工程技术的应用,尝试还原古代生物的生物力学特征,探索它们在适应环境、捕食、生存等方面的优越性。这种跨学科的方法有望为生物工程、医学、机器人技术等领域提供创新的设计和解决方案。

古生物工程学示意图。图片来源:卡内基梅隆大学
【思考题】学而时习之
Q1: 古老生物的运动方式如何启发现代机器人设计?通过软体机学技术还原古老生物的生物力学,是否可以为未来机器人的智能设计提供新的灵感?我们是否能够借鉴自然界的设计,创造更智能、更灵活的机器人,从而进一步推动科技的发展?
Q2. 软体机学如何改变我们对生物学和科技发展的认知?这一技术不仅帮助我们理解了古老生物的生命活动,还为科技发展提供了新的思路。在软体机学的引领下,我们能否更深入地探索生命的奥秘,推动科学研究向前迈进?这种融合的科技是否会改变我们对自然、生命和技术的整体认知?
编译 | 王芊佳
审 | 绿茵
排版 | 绿叶
【海湿·往期相关报道】
1.硫同位素揭示过去:前沿技术辨识远古湿地居民
2.“古代巨无霸”现世!新发现的“秘鲸”或为地球上最重的动物!
3.深海“与时间赛跑”:水下考古人员在抢救性发掘中常处于挫败的边缘
【参考链接】
1.Richard Desatnik, Zach J. Patterson, Przemysław Gorzelak, Samuel Zamora, Philip LeDuc, Carmel Majidi. Soft robotics informs how an early echinoderm moved. Proceedings of the National Academy of Sciences, 2023; 120 (46) DOI: 10.1073/pnas.2306580120
2.450-million-year-old organism finds new life in Softbotics
https://engineering.cmu.edu/news-events/news/2023/11/06-paleobionics.html


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国