

作者 李传福
在自然界中,许多生物利用弹跳来进行移动、捕食或逃避天敌,例如蚱蜢能依靠强壮的后腿实现垂直跳跃至自身长度的10倍。科学家们一直致力于将这种高效且适应复杂地形的运动方式应用到微型机器人领域,以实现软体弹跳机器人的高效运动。
近日,浙江大学赵朋教授和张承谦博士带领的团队在这方面取得了突破性进展。他们开发的新型软体机器人,不仅能够实现超过自身身高100倍的弹跳,而且响应时间仅需数十毫秒,这在软体机器人技术领域是一个巨大的突破。
该团队创新性地构建了一种立体折叠的双稳态结构,利用磁性材料和硅胶材料的特性,实现了机器人在垂直方向上的翻折。这种结构具有两个稳态点,能够在轻微的反向作用力下触发突弹跳变现象,释放存储的弹性势能,实现高功率输出。
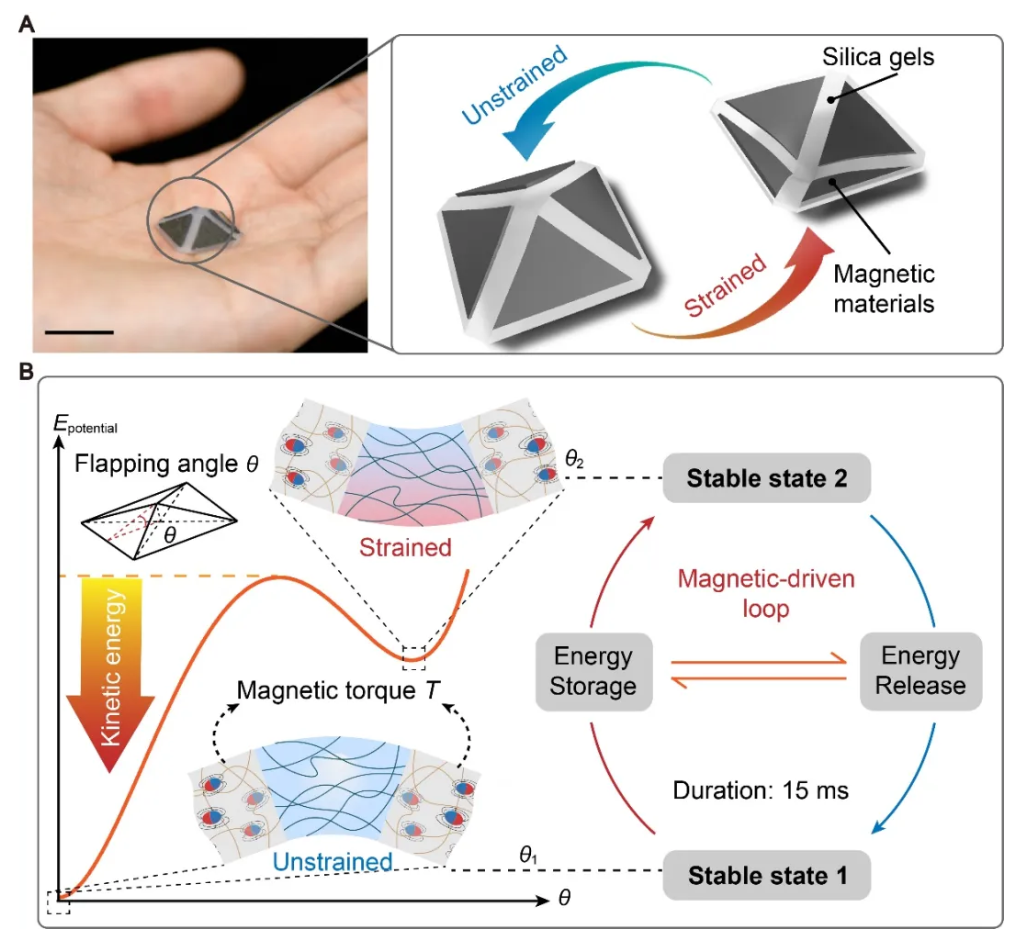
弹跳机器人工作原理示意图
通过磁场的无线实时驱动方法,双稳态弹跳机器人能够在不同稳态间进行快速切换,实现了与自然界中弹跳昆虫相媲美的响应速度。研究人员通过多参数调控,使机器人能够衍生出大幅度跳跃和连续性微跳两种运动模式。
双稳态弹跳机器人在偏转磁场的驱动下,能够改变起跳方向与角度,实现360度全向弹跳。通过精确调整磁场的强度和方向,机器人的弹跳轨迹在高度和距离上都能得到细致的调控。
研究人员还展示了双稳态弹跳机器人在封闭管道等复杂环境中的应用潜力。机器人能够通过连续微跳的方式灵活穿越S形管道,利用精确的定向弹跳能力跨过U形管道,并展现出了良好的跨介质弹跳能力。

弹跳机器人在封闭管道中的运动演示
这项研究不仅在软体机器人技术领域实现了性能的显著提升,也为软体机器人的进一步研究与发展提供了新的思路和方法。通过磁场参数调控,双稳态弹跳机器人展现出了出色的灵活性和越障能力,以及对复杂环境的良好适应性。


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国