

编译:公子欣
具有移动接触点(包括滚动、滑动和冲击)的机械系统在工程应用和日常体验中很常见。当物体动态探索移动结构的复杂表面形状时,分析此类系统的挑战就会变得更加复杂,就像我们熟悉但不太了解的——呼啦圈。在享受快乐的时候,我们可能会忽略它带来的一些有趣问题:
呼啦圈为什么能抵抗重力?什么体型的人更擅长转呼啦圈?
日前,纽约大学一个数学家团队探索并回答了这些问题,首次解释了呼啦圈的物理学和数学原理。他们的发现也指出了更好地利用能源和改进机器人定位器的新方法。研究结果在《美国国家科学院院刊》上发表。

“我们特别感兴趣的是,什么样的身体动作和形状可以成功支撑呼啦圈,以及会涉及到什么样的物理要求和限制。”该论文资深作者、纽约大学科朗数学科学研究所副教授Leif Ristroph说。
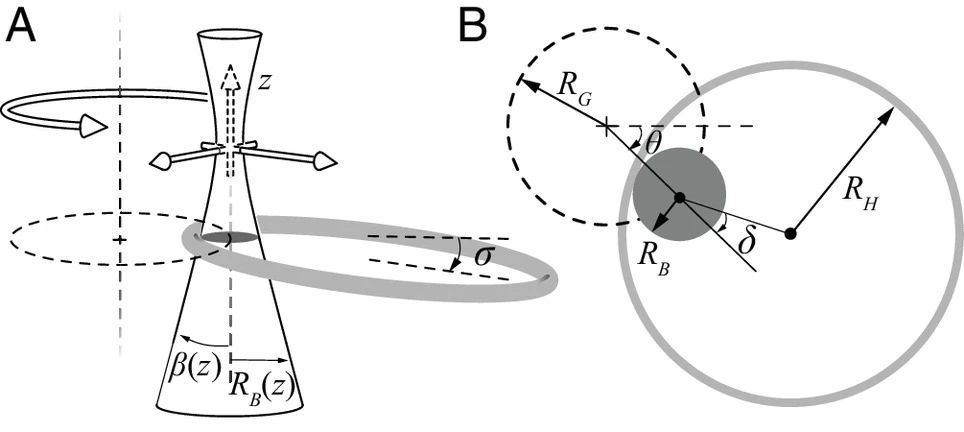
为了回答这些问题,研究人员在纽约大学应用数学实验室模拟了呼啦圈。他们在机器人呼啦圈的一系列实验中测试了不同的形状和运动,使用3D打印的不同形状的身体(例如,圆柱体、锥体、沙漏形状)来代表1/10大小的人类体型。这些形状由马达驱动旋转,模仿人们在转呼啦圈时的动作,直径约6英寸(约15厘米)的圆环被投射到这些身体上,高速视频可捕捉到这些动作。
结果表明,旋转运动的确切形式或身体的横截面形状(圆形或椭圆形)并不是呼啦圈运动的影响因素。“在所有情况下,不需要任何特别的努力,就可以使呼啦圈围绕身体建立良好的旋转运动,”Ristroph解释说。
然而,在相当长的一段时间内,保持呼啦圈在重力作用下升高是比较困难的,需要一个特殊的“体型”——具有倾斜表面的“臀部”以提供适当的角度来推动圈,以及一个弯曲的“腰部”来固定圈的位置。
“人有许多不同的体型,有些人的臀部和腰部具有倾斜和弯曲的特征,有些人则没有,”Ristroph说,“我们的研究结果或许可以解释为什么有些人天生就很擅长转呼啦圈,而有些人似乎需要加倍努力。”
研究人员对这些动力学进行了数学建模,以推导出解释实验结果的公式,这些计算不仅解释了呼啦圈运动的物理机制,还可用于其他领域。
原理图
研究人员表示很惊讶,像呼啦圈这样流行、有趣、健康的活动,在基本的物理水平上都没有被理解。
Ristroph说,“随着在研究上取得进展,我们意识到呼啦圈所涉及的数学和物理学非常微妙,所获得的知识可能有助于激发工程创新,从振动中收集能量,以及改进工业加工和制造业中使用的机器人定位器和移动器。



 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国