

早在2002年,她便在英国曼切斯特大学获得永久教职,至今国际机器人领域仍流传着“乔的概念”,但她却在声名鹊起之时大手一挥,抛开所有橄榄枝转身归国,组建团队带领国产机器人走上腾飞之路。“我们国家正处于发展壮大的关键历史时期。学有所成后报效祖国,是一个中国人的责任,也是一种荣幸。”这句话就出自2021年当选中国科学院信息技术科学部院士的乔红之口。

乔红
归国
无论何时,乔红看上去总是沉稳端庄,眉宇间凝聚着智性的光辉。这是她多年耕耘的结果,也是出身书香世家的气韵。
20世纪60年代,乔红出生在一个典型的知识分子家庭——父母都是西安交通大学教授,这所高校也在之后“顺理成章”地成为了乔红的母校。1989年,乔红研究生毕业于西安交通大学计算机科学与技术专业,随后赴英留学。
彼时,从小“不爱红装,偏爱机械”的乔红在打开国际视野之后更加坚定地形成了一套自己的想法,即机器人未来发展的一个重要趋势是越来越接近生物,“它们将不仅是冰冷的机器,而应该具有包括认知、情绪、逻辑、动作在内的一系列类人化的特征”。这种认知在早期被她外化为机器人操作中的“环境吸引域”方法,而她也正是借此在国际上崭露头角、拥有姓名——国际期刊直接报道此理论为“乔的概念”。
但令众人都没想到的是,在智慧的光辉之下斩获永久教职、一路顺风顺水之时,乔红却将目光投向了祖国的机器人市场。她发现,彼时国内的机器人研究尚处起步阶段,于是她积极主动地走向了更大的挑战——2004年,她正式放弃海外教职,归国加入中国科学院自动化研究所任研究员。
如今整整20年过去,乔红仍在机器人与神经科学的交叉融合方向上坚持不懈地探索着。建立起团队,她带头长期从事机器人“手—眼—脑”的研究,也就是机械手的控制、机器人视觉及类脑人工智能的应用与融合。
2024年1月,已过天命之年的乔红再次出现在镜头前,端庄大方、言笑晏晏地向大家介绍自己的“新身份”,即北京人形机器人创新中心专家委员会主任。同时她说:“帮助解决产业瓶颈,正是支持我前进的动力。面对具身智能的浪潮,我和团队势必要在这场人工智能的大革命中,提高我国机器人的综合实力,让我们的机器人走在最世界前沿。”

乔红接受媒体采访
创新
短短一个月,乔红就让自己的希冀照进了现实。2024年2月,由乔红带领的中国科学院自动化研究所人形机器人攻关团队自主宣布研制出了人形机器人设计组装“大工厂”(简称“大工厂”),可自动完成人形机器人硬件AI设计方案和软件算法的选择,并在高精度环境下进行快速验证,大幅缩短现有研发周期。
“大工厂”基于“环境吸引域”高精度作业和类脑智能机器人理论等原始创新积累,自主突破了高爆发一体化关节、AI赋能设计、机器人大模型、类人柔顺控制等核心技术。这就像是一个装满了机器人制造知识及原理的大模型,只需要告诉大模型,你希望得到一个怎样的人形机器人,它便会根据你的需求和使用场景,生成出最佳的设计制造方案。同时在接收海量反馈数据支撑下,“大工厂”会不断为机器人优化。
其中,十分生动、成功的例子莫过于在2024年陆续亮相,由中国科学院自动化研究所人形机器人攻关团队研制的谱系化人形机器人Q系列——
Q1仿生高动态机器人,采用的是仿鸵鸟低惯量结构设计,实现了机器人全身姿态准确跟踪与平衡控制。在视频中,机器人可以从容地进行射箭、倒水、手机充电等对精准度要求高的动作。
Q2多地形适应机器人,实现了室内外各种复杂地形的自适应与稳定运动。该机器人采用的是“有限元分析+拓扑优化”设计,通过观测器内核裁剪实现高实时控制,机器人在面对非常规地形时仍能保持原有运动状态。
Q3高爆发运动机器人,实现批量化机器人鲁棒控制与不同环境适应能力。Q3机器人采用了功能结构与支撑结构解耦安全设计,通过知识工程与AI融合高精度建模,针对农田作业、野外巡逻等室外场景应用需求训练开发。
Q4类脑智能机器人,致力于揭示高等动物大脑、身体构造、运行机制,并用机器人复现高等动物的智能行为,是一台“科普机器人”。Q4从神经环路到肌肉激活,模拟人的机制、结构和功能,实现了冗余、耦合系统的高柔顺、高进度运动。
Q5高并发推理机器人,是一个第一视角的机器人具身智能体,从大脑、小脑、中枢等原理模仿人类,使其具备人类的智力、行动和协同能力,为智慧工厂作业、家庭生活服务提供重要支撑。
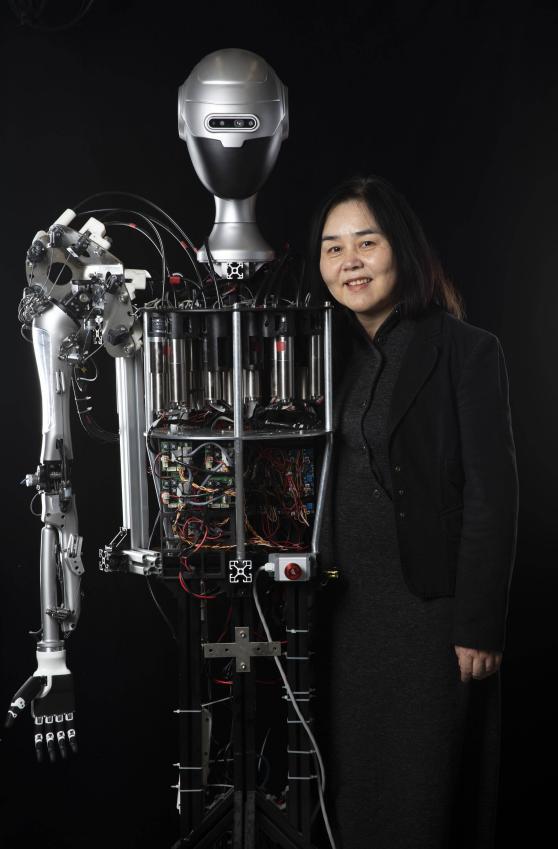
乔红与Q系机器人合影
“机器人的手该是灵巧的、脚该是灵敏的、眼该是明亮的、脑子该是聪明的,最重要的是,它的手足眼脑要是高度融合的。而这样的机器人现在仍然是昂贵的。因此,我希望未来能够解决这样的技术壁垒,打破我国机器人制造业的瓶颈,让我国的工业机器人能够稳稳站在国际舞台上!”这是乔红的愿望,也是她至今仍在奋力前行的本源动力。


 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国