


一直以来,水稻收获环节的效率瓶颈制约着农业智能化生产的进一步发展。传统方式下,无人驾驶收获机需频繁进行卸粮转运,作业连贯性差,严重影响整体收获效率。罗锡文院士团队精准锚定这一关键难题,全力投入研发,成功打造出一套采用履带式收获机和运粮车为平台的自动协同收获–转运系统。相关成果以“Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter”(基于双卸粮模式的水稻协同收获转运策略及系统研究)为题发布于中国工程院院刊《Engineering》,华南农业大学农业机械与装备关键技术教育部重点实验室丁凡为第一作者,张闻宇为通讯作者。

图1. (a) HWU 和 (b) TFU 的作业场景。
团队创新性提出 “收获机等待卸粮(HWU)” 和 “运粮车跟随卸粮(TFU)” 的双卸粮模式,构建了高效的收获–卸粮–转运(HUT)策略。HWU 模式保障收获机在粮仓满载时有序等待运粮车,适用于田边空间有限的卸粮和转运;TFU 模式则使收获机在作业中无需停车即可完成卸粮,极大保证了作业流畅性。两种模式灵活配合,依田块实际情况切换,有效减少收获机非作业时长,大幅提升作业效率。
在技术实现层面,针对双模式收获–卸粮–转运作业非顺序性和高复杂性的特点,团队基于有限状态自动机(FSM)原理,将其统一至一个循环状态框架内,将复杂的流程切分为基本动作,提炼出关键状态节点,通过状态变量决定循环分支的走向,提高流程的可解析性,并为后续的进一步优化和扩展提供良好的基础。
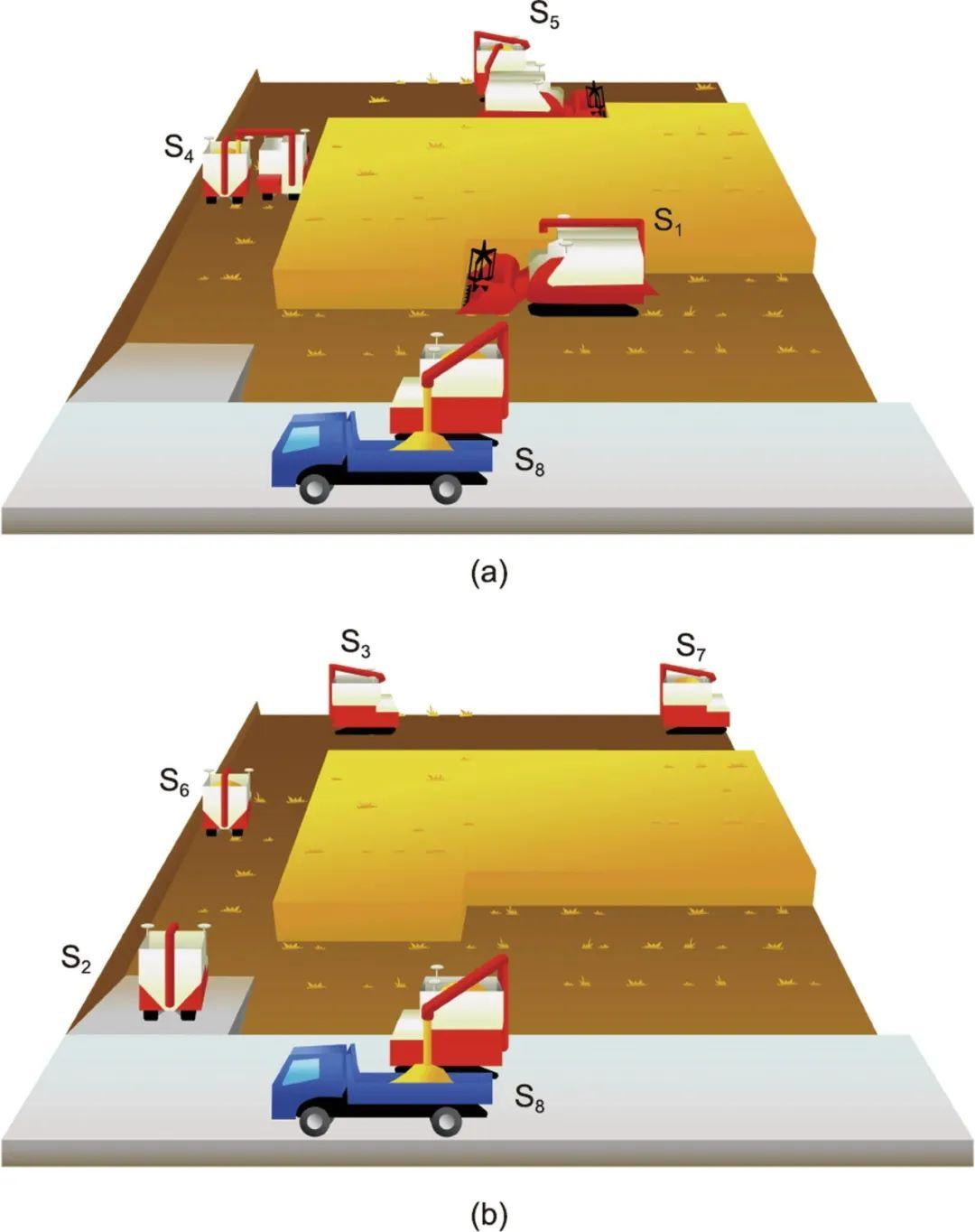
图2. HUT 协同作业的主要阶段(S1-S8)和流程。(a)收获机和运粮车协同卸粮的示意图。(b)运粮车的五个停车状态。
最后通过仿真与田间试验充分验证了该策略的可行性。利用MATLAB Simulink 和 Stateflow 模块构建的仿真模型清晰呈现了双机的状态转移过程,表明了HUT策略及其逻辑框架的有效性。在华南农业大学增城教学科研基地水稻无人农场进行的田间试验表明:收获过程顺利完成 6 次 TFU 和 1 次 HWU,运粮车成功卸粮 4 次,在1.9 m收获幅宽及0.8 m∙s−1收获机速度的条件下,收获效率达到了0.42 hm2∙h−1,较单收获机效率提升26.0%,比仅用HWU模式提高9.9%。
罗锡文院士团队的这一成果,得到了国家重点研发计划项目、国家自然科学基金项目、国家糖料产业技术体系、山东省重点研发计划项目的资助,为水稻协同收获提供关键理论与技术支撑,为无人农场收获环节开辟新路径,有力推动农业机械化、智能化进程。展望未来,团队将持续深耕,聚焦智慧农场耕种管收智能化作业等关键领域,不断拓展农业科技前沿,为保障粮食安全、推动农业现代化持续奋进,引领农业科技发展新方向。
文章信息:
Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter
基于双卸粮模式的水稻协同收获转运策略及系统研究
作者:
丁凡,罗锡文,张智刚,胡炼,吴欣洛,鲍开元,张嘉锐,苑炳轩,张闻宇
引用信息:
Fan Ding, Xiwen Luo, Zhigang Zhang, Lian Hu, Xinluo Wu, Kaiyuan Bao, Jiarui Zhang, Bingxuan Yuan, Wenyu Zhang. Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter. Engineering, https://doi.org/10.1016/j.eng.2024.11.006
开放获取全文
https://www.engineering.org.cn/engi/EN/10.1016/j.eng.2024.11.006

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国