

这是达医晓护的第1826篇文章
GPS导航在人们生活中越来越重要,人们在出门或旅游前都会很习惯的打开手机导航软件,输入目的地,规划线路,开始实时导航,从而快捷准确的到达目的地。而在与人们日常生活相去甚远的医院手术室,也有一种“GPS”导航系统,在脊柱外科手术中发挥着巨大的作用,那就是接下来要给大家介绍的术中实时三D导航系统。

很多脊柱外科疾病的手术离不开脊柱内固定尤其是椎弓根螺钉的固定。我们都知道,人的脊柱是重要的支撑结构,并保护着重要的脊髓和神经根。因而脊柱内固定位置的好坏在某种程度上决定了手术的成败。内固定位置有差错,轻则破坏骨质造成稳定性降低,重则伤及神经,造成功能障碍,病情较为复杂的疾病如脊柱畸形、脊柱肿瘤等风险性更高。因此在手术过程中,如何精准、快速、安全的植入脊柱内固定物成了每一个脊柱外科医师需要面对的难题。
传统脊柱外科手术中,手术医师通常需要根据术前的检查结果,如X线、CT、MRI等检查结果,以及术中所见的解剖标志和术中透视,来判断患者的解剖结构,进而植入椎弓根螺钉或者其他内固定物。但X线和术中透视为平面图像,CT和MRI是将人体分成若干个连续的层面,对每一个层面进行扫描,之后通过计算机重建形成图像,均为断层图像,不能全面、准确的反映患者的解剖结构。而每位患者个体差异较大,年龄和疾病因素均可造成解剖标志的改变甚至消失,增大了手术医师手术的难度。有研究报道,徒手植入椎弓根螺钉的准确率约为90.3%-94.1%,而且该准确率与患者疾病复杂程度以及手术医师置钉经验有关,当疾病病情复杂、解剖结构变异或技术经验不足时,仍然有较大几率出现螺钉植入位置不良的情况,严重的甚至会给患者造成极大的痛苦。而术中实时导航系统则可以较好的针对上述几个不足之处进行改进,帮助手术医师更好的进行螺钉植入。
术中导航系统,是将患者术前或术中所进行的影像学检查如CT数据和手术床上病人解剖结构进行准确对应,手术中跟踪手术器械并将手术器械的位置在患者影像上以虚拟探针的形式实时显示,可以清晰显示患者的解剖结构。

图1:O-arm

图2:计算机导航仪
脊柱外科手术中常用的实时三D导航系统由O-arm和术中计算机导航仪两部分组成(图1-2)。确定好手术节段后,先采用O-arm对手术节段进行扫描,随后将数据传输至导航仪内,由计算机导航仪进行计算并重建出三D立体的图像,通过和固定于患者身上的定位架进行匹配(图3),从而将三D立体的图像与手术床上患者的实体结构进行精准的对应,减少了因手术体位与术前检查体位差异导致的解剖位置上的误差。术中导航系统可以在手术过程中追踪手术器械,并将手术器械的位置在病人术中的影像上实时更新显示出来,让手术医师可以清楚准确地看到手术器械的位置,以及与患者解剖结构之间的关系。同时导航系统的导航功能,可以实时模拟手术器械的前进和后退,还可以显示手术器械向患者身体深处的延长线,帮助手术医师更准确的判断手术器械前进路线上的解剖结构与周围组织的关系。同时具备的实时测量功能可以测量患者解剖结构的深度和宽度,有助于医师选择正确尺寸的内固定物(图4)。通过以上这几点,术中实时三D导航系统能有效地帮助手术医师更加精确安全的进行手术,而不仅仅靠经验来解决问题,就能大大提升脊柱置钉准确率,减少置钉失误导致的术后脊柱不稳定、脊髓神经和血管等重要结构损伤等并发症。导航系统能明显减少手术中C型臂X线透视的使用,而且O-arm扫描时手术医生可以离开手术室,这就能同时减少患者和手术医师所接受的辐射量,更好的保护手术人员的安全。
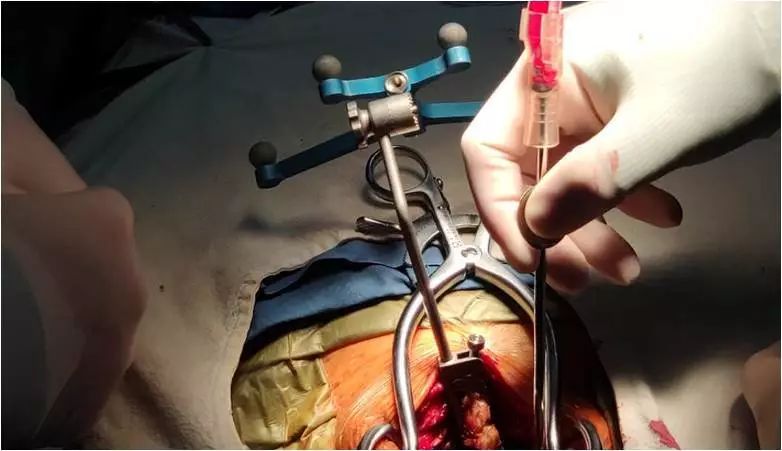
图3:术中定位架

图4:导航系统操作界面
目前术中实时三D导航系统已经广泛应用于多种脊柱外科疾病的手术治疗,如复杂脊柱骨折、颈胸椎黄韧带骨化、椎管狭窄症、腰突症、腰椎滑脱、脊柱肿瘤、脊柱畸形等。尤其是继发性脊柱恶性肿瘤,转移性肿瘤侵蚀椎体,导致正常结构破坏,给脊柱手术带来了极大的困扰。而采用术中实时三D导航系统,可以帮助医生术中实时判断患者的病变位置、大小范围以及与周围组织的毗邻关系,尤其是血管神经等重要结构,可以更加安全的进行手术。
由此可见,术中实时三D导航系统就如同生活中使用的GPS导航一样,可以为手术医师提供清晰准确的人体“地图”并实时导航手术,使手术更加安全、更加精准!
作者:复旦大学附属中山医院
复旦大学医学科普研究所
王振卿 林红
审校:董健

 扫码下载APP
扫码下载APP
 科普中国APP
科普中国APP
 科普中国
科普中国
 科普中国
科普中国